Danuc Humanoid Robot Build
This Post will show you how to build small sized working humanoid robot.
watch our video at following link.we built this robot in end of 2013.
This is the Humanoid walking video:
https://www.youtube.com/watch?v=w5SqGl6r66I
This is the Humanoid Dance video:
https://www.youtube.com/watch?v=BcayCs8By0w
One can use Aluminum or 3D Printed plastic brackets to build best possible Humanoid Robot that can walk ,Dance,and do various lovely action.
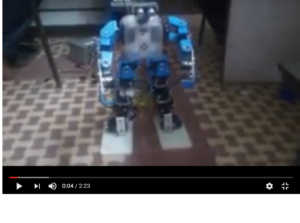
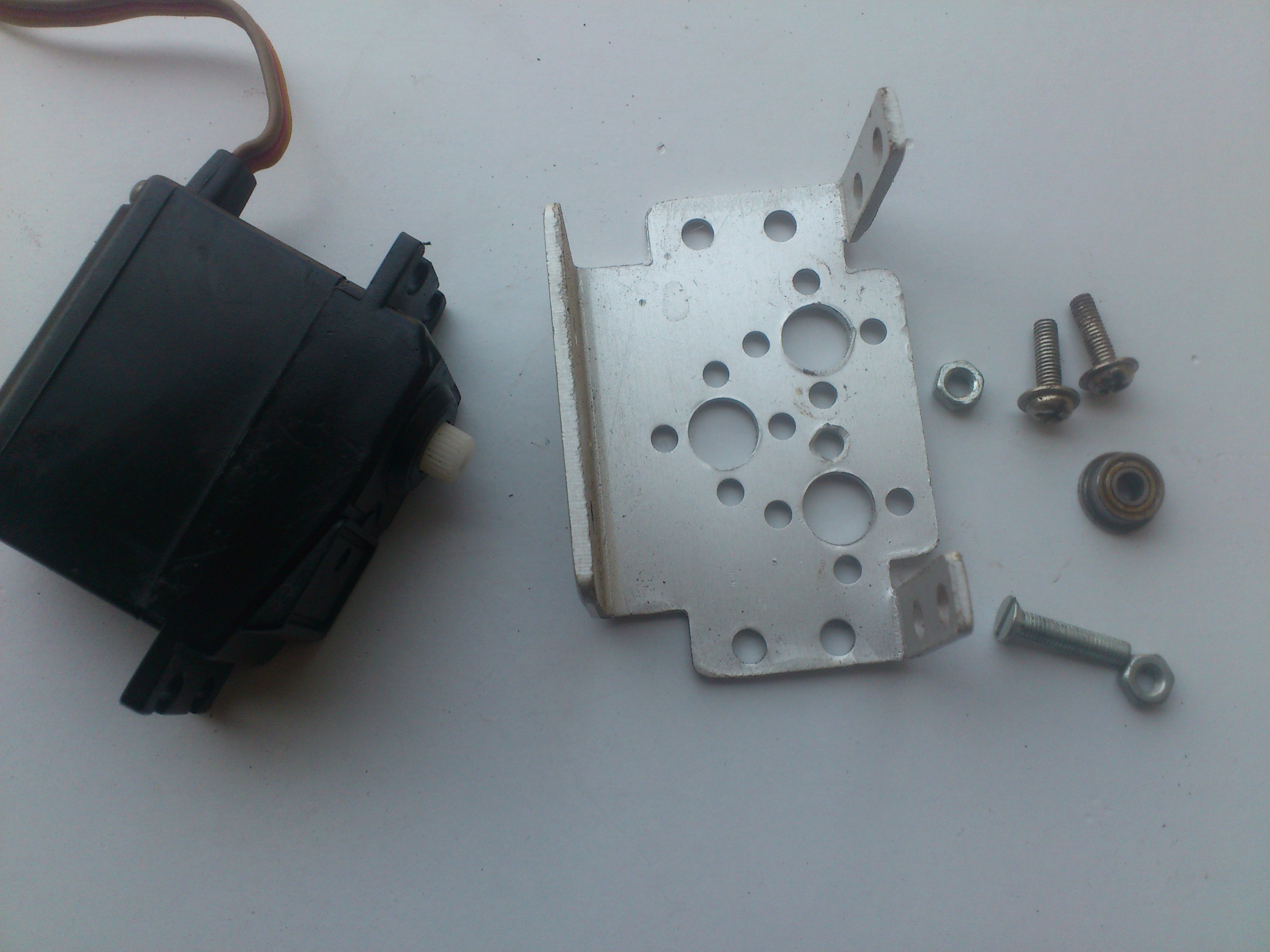
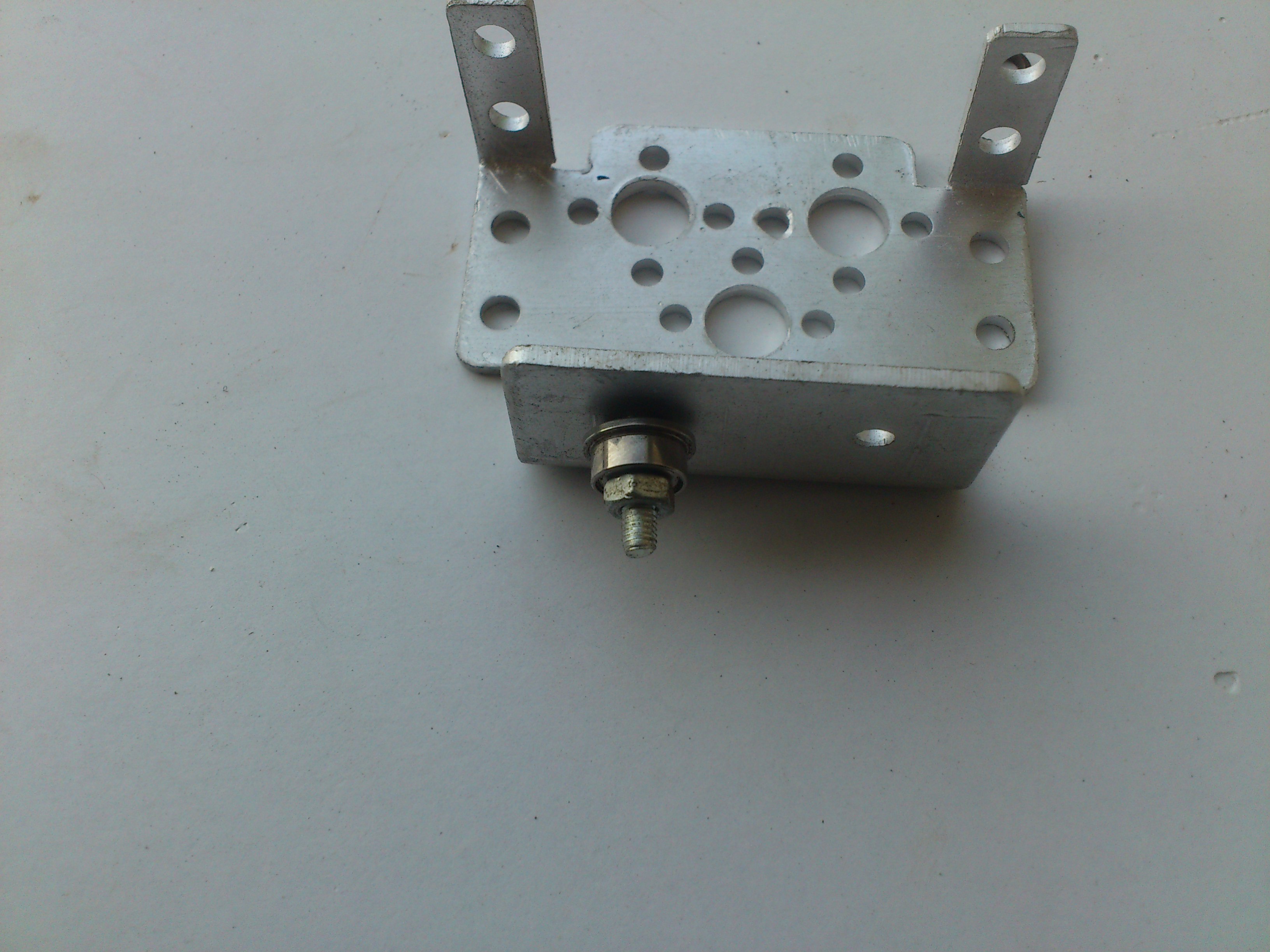
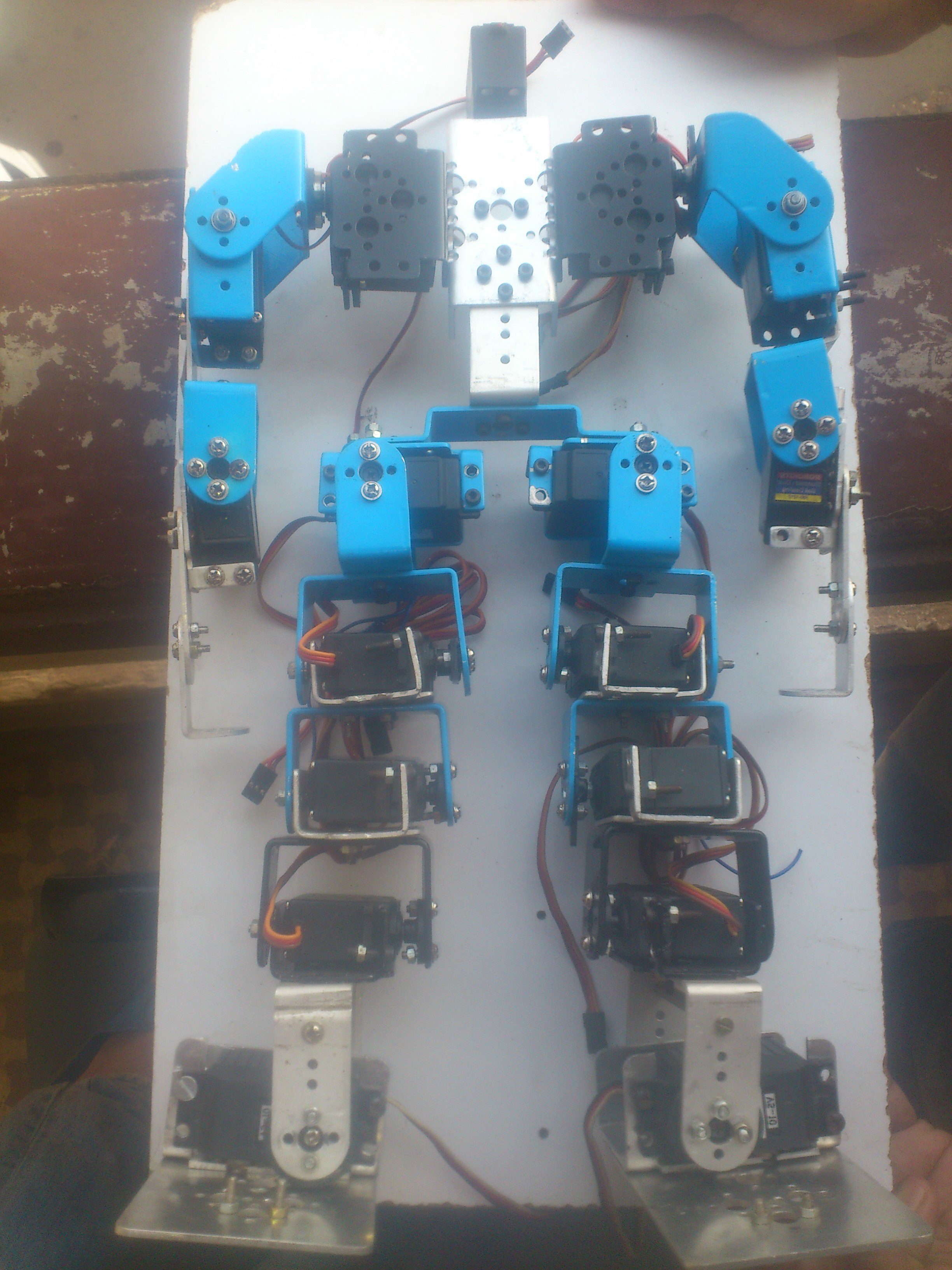
This Robot may not look Professional but it works perfectly and i can guaranty that if you properly fine tune it will work flawlessly.It took us more than a year to complete first Robot in 2013. almost six months were spent in building first ever mechanics of this robot in 2012. we manufactured all the servo brackets at our own manufacturing facility. All brackets are made up of 2mm thickness high grade Aluminium using stamping process ,which consists of 25 ton Electric power press to which DIE is attached and stamping is carried ,for mass scale manufacturing and finally brackets are bent by using bending DIE.
Below shown are images of brackets used to build this robot.
i have uploaded extra images for details of this robot.also different configurations of this robot were built and tested in 2012 to 2013 in order to finalize on working design.kindly go through the images and videos on top.
Please visit our channel http://www.youtube.com/danucrobotics
You can go through all development videos in above link.
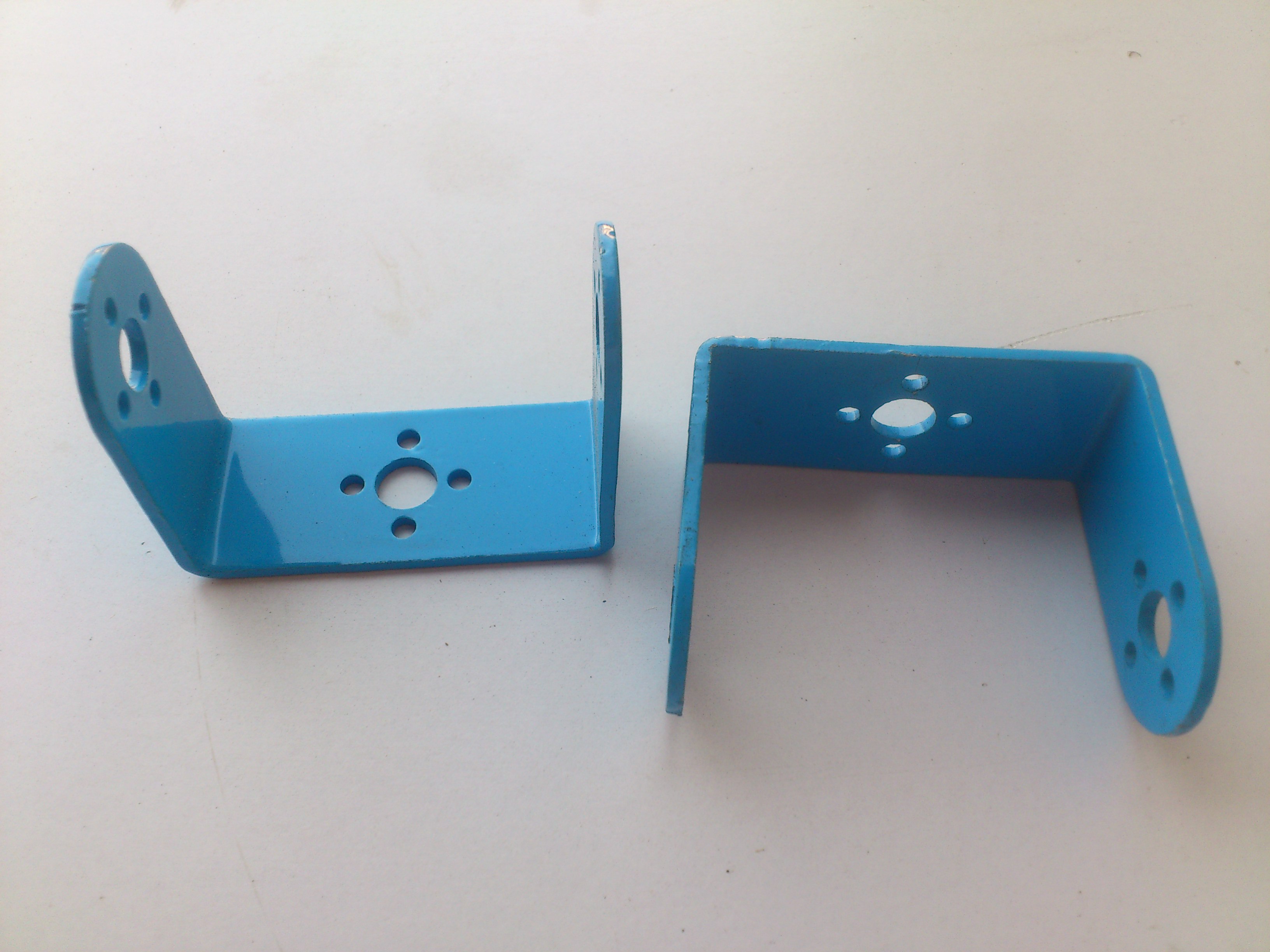
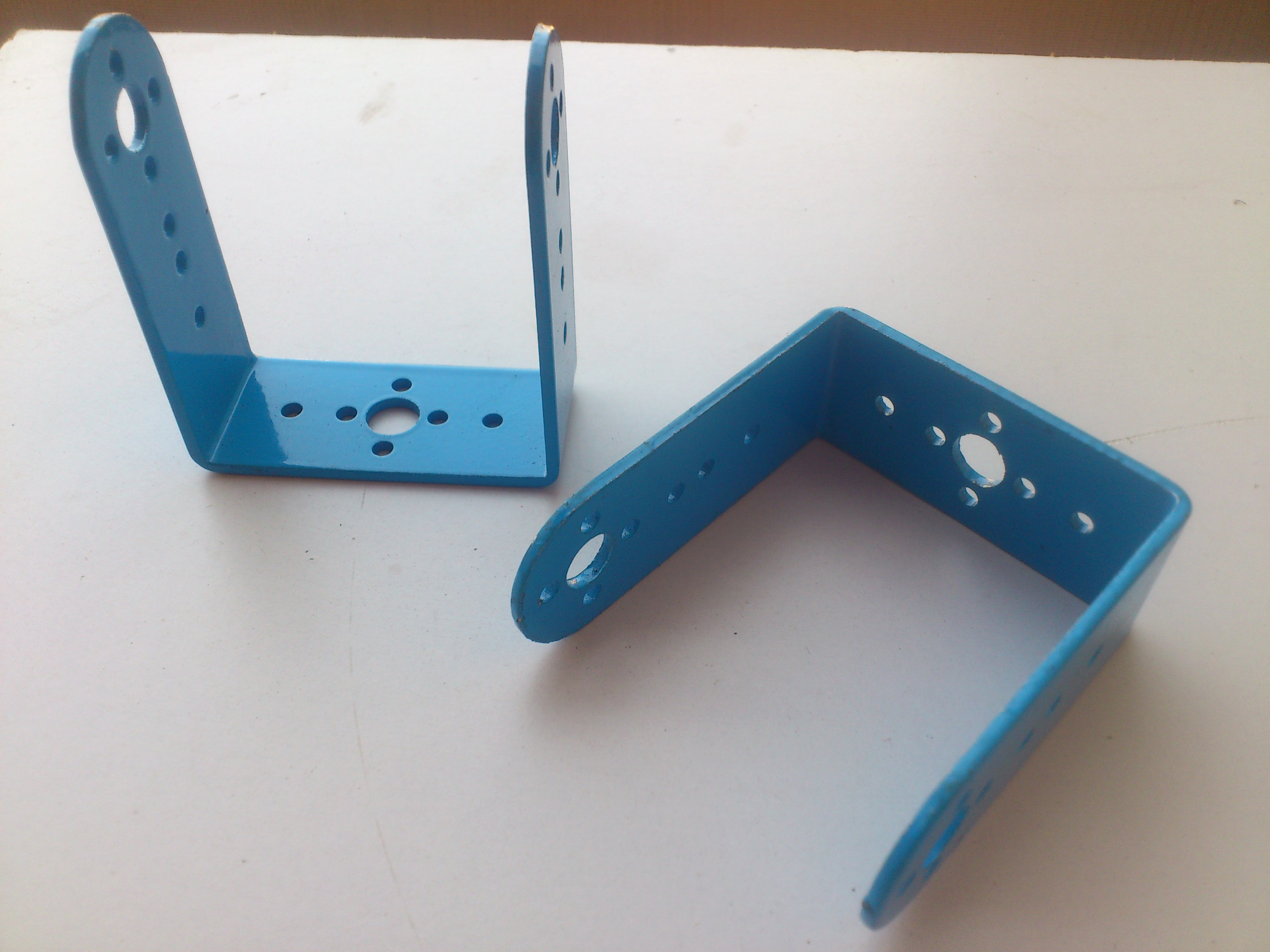
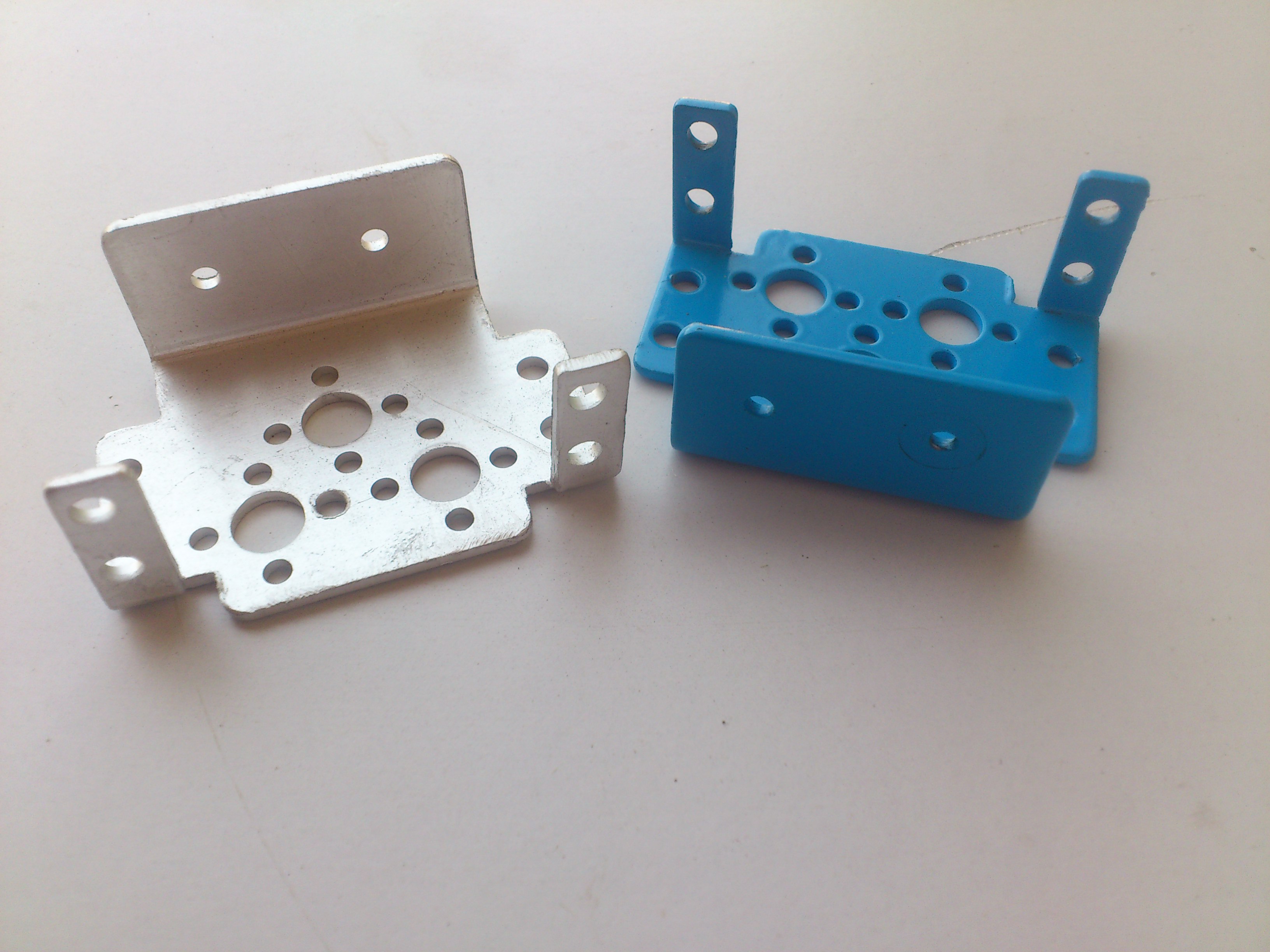



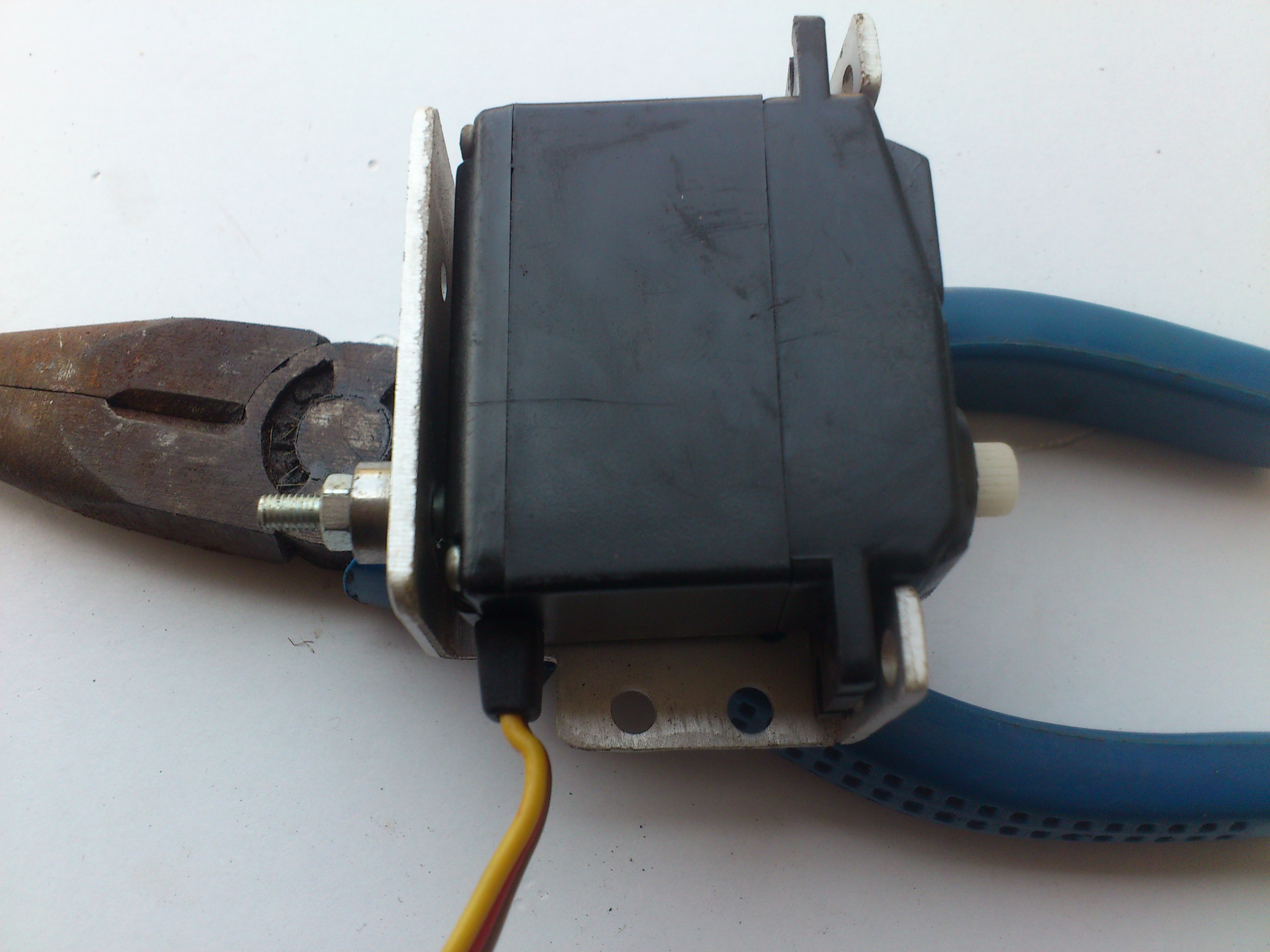
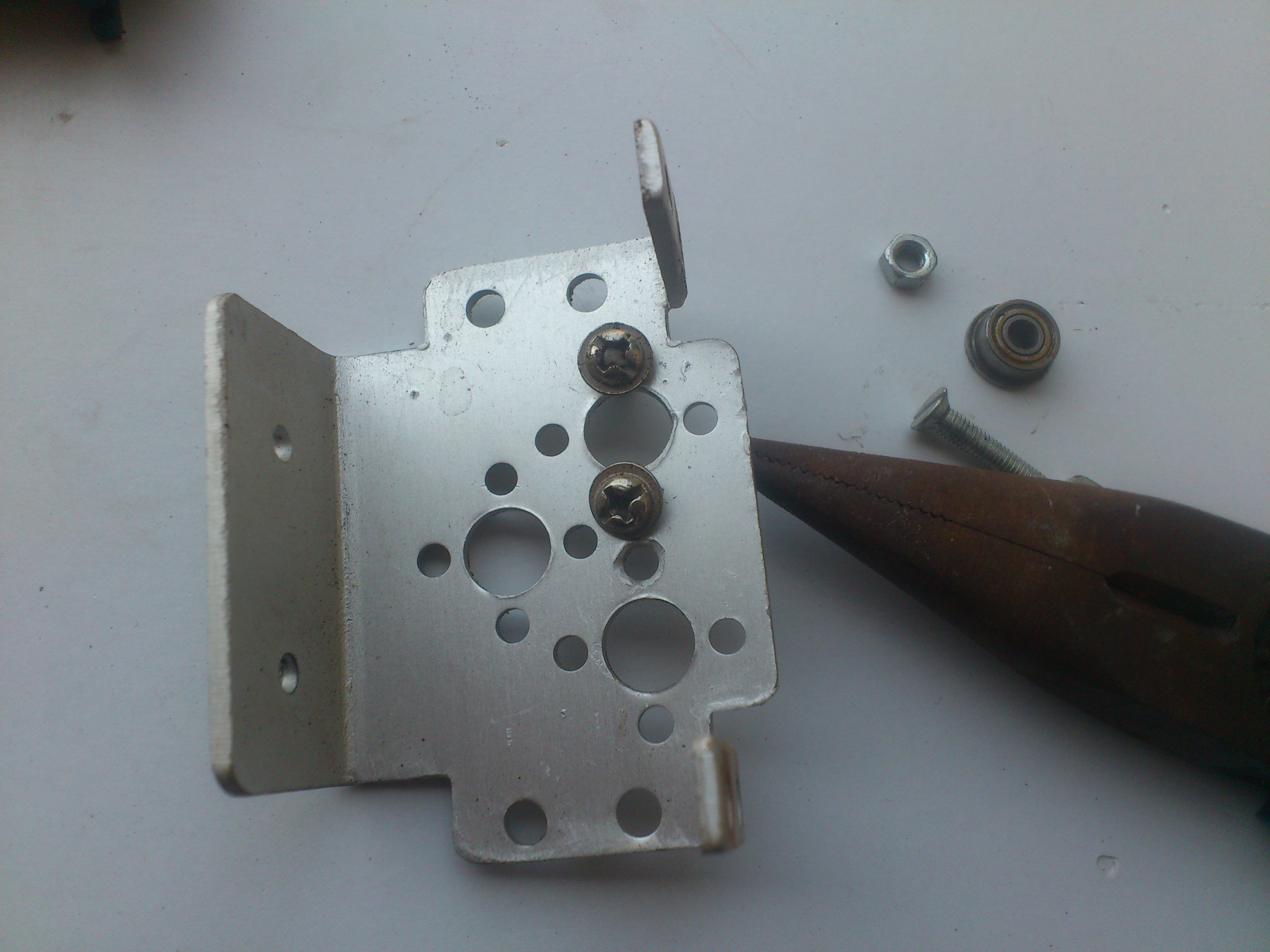
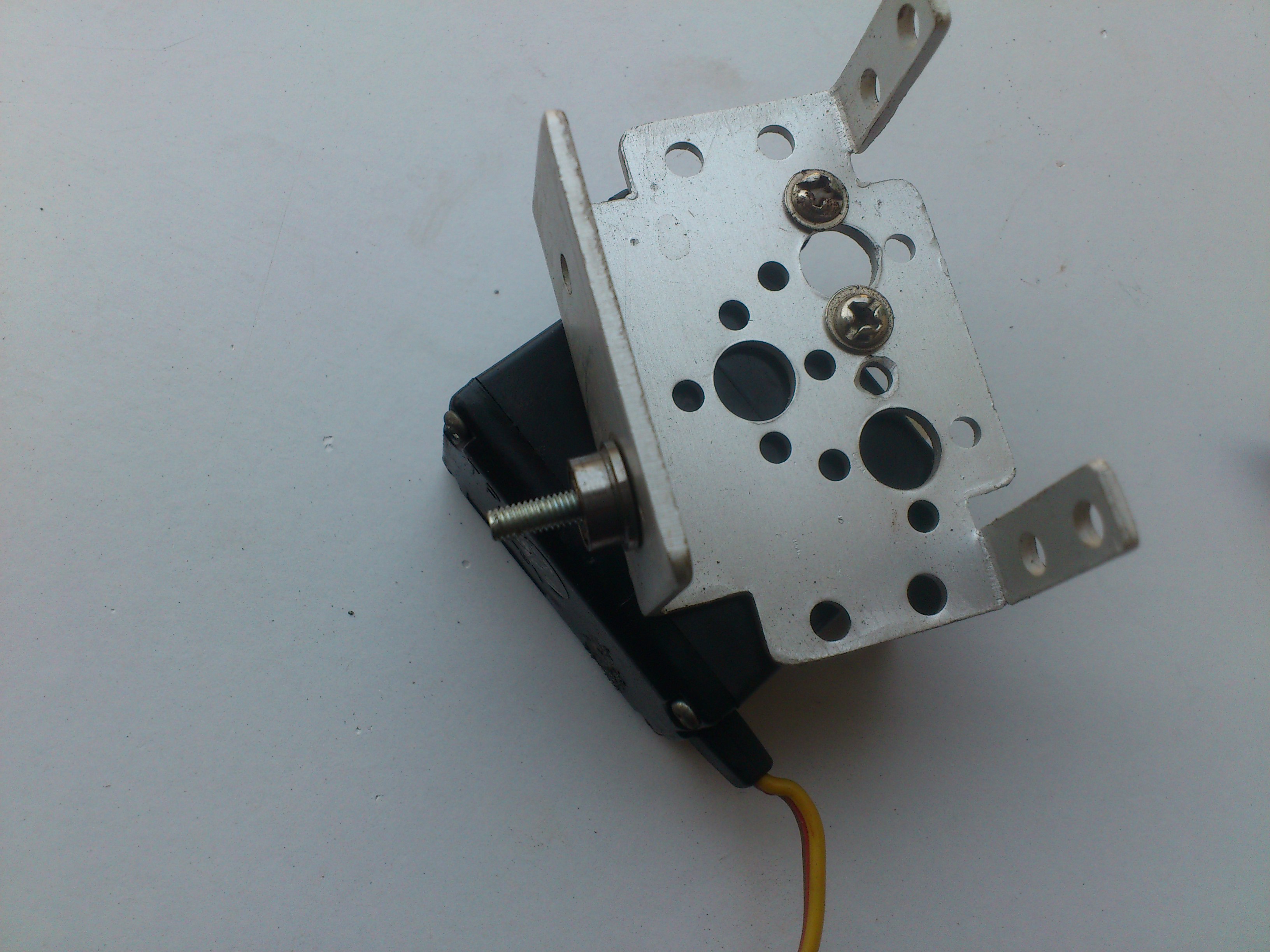
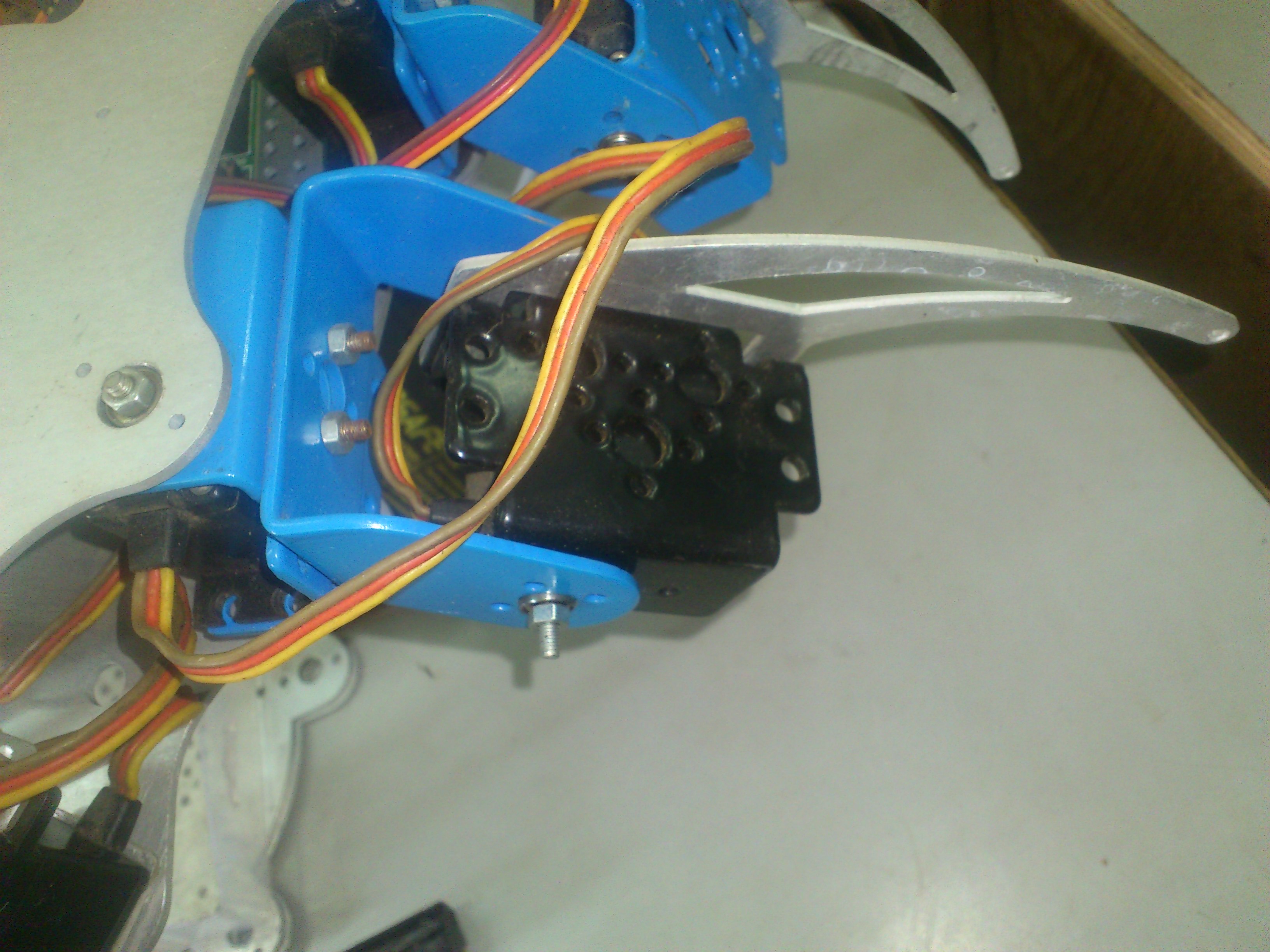
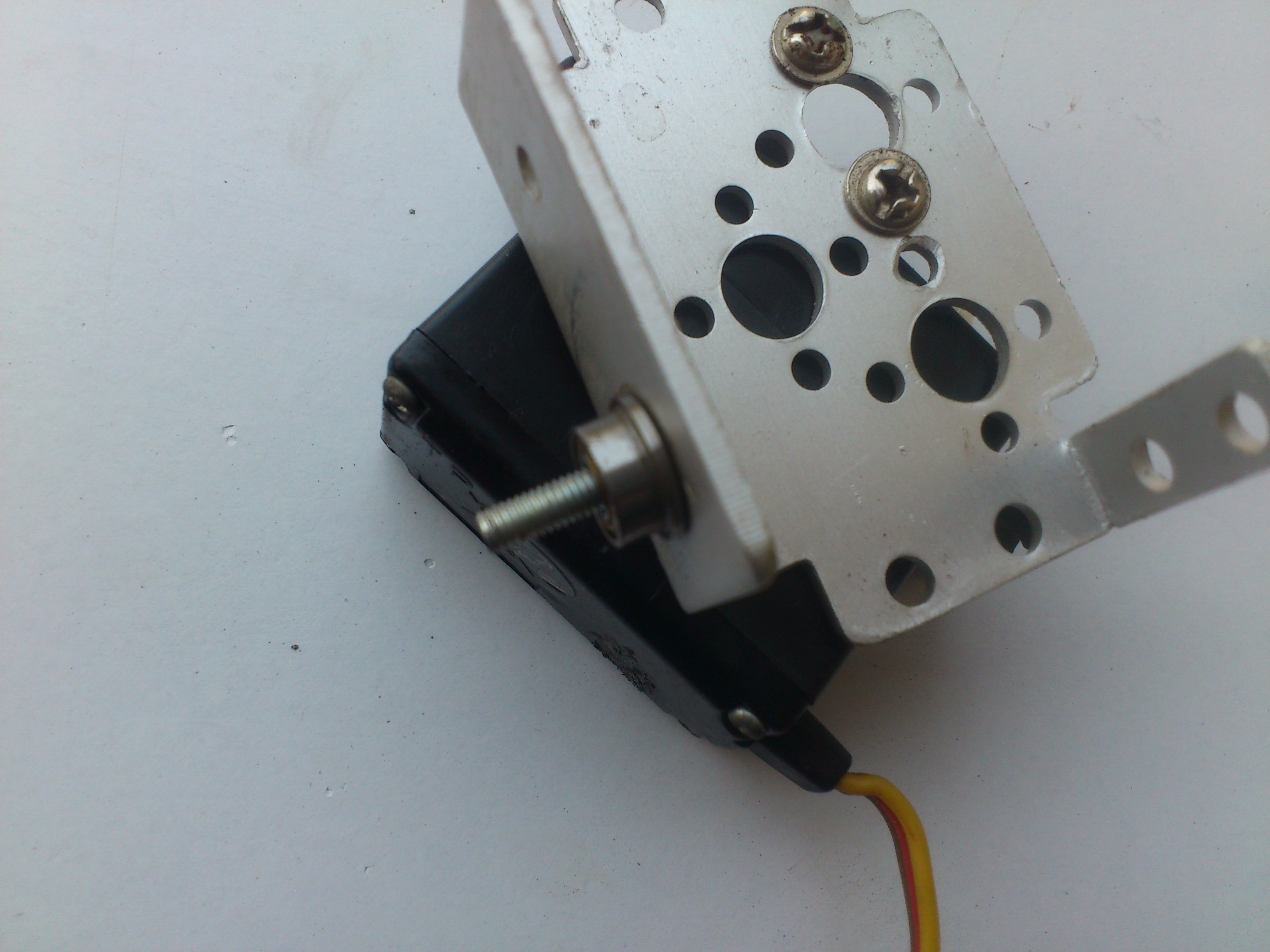
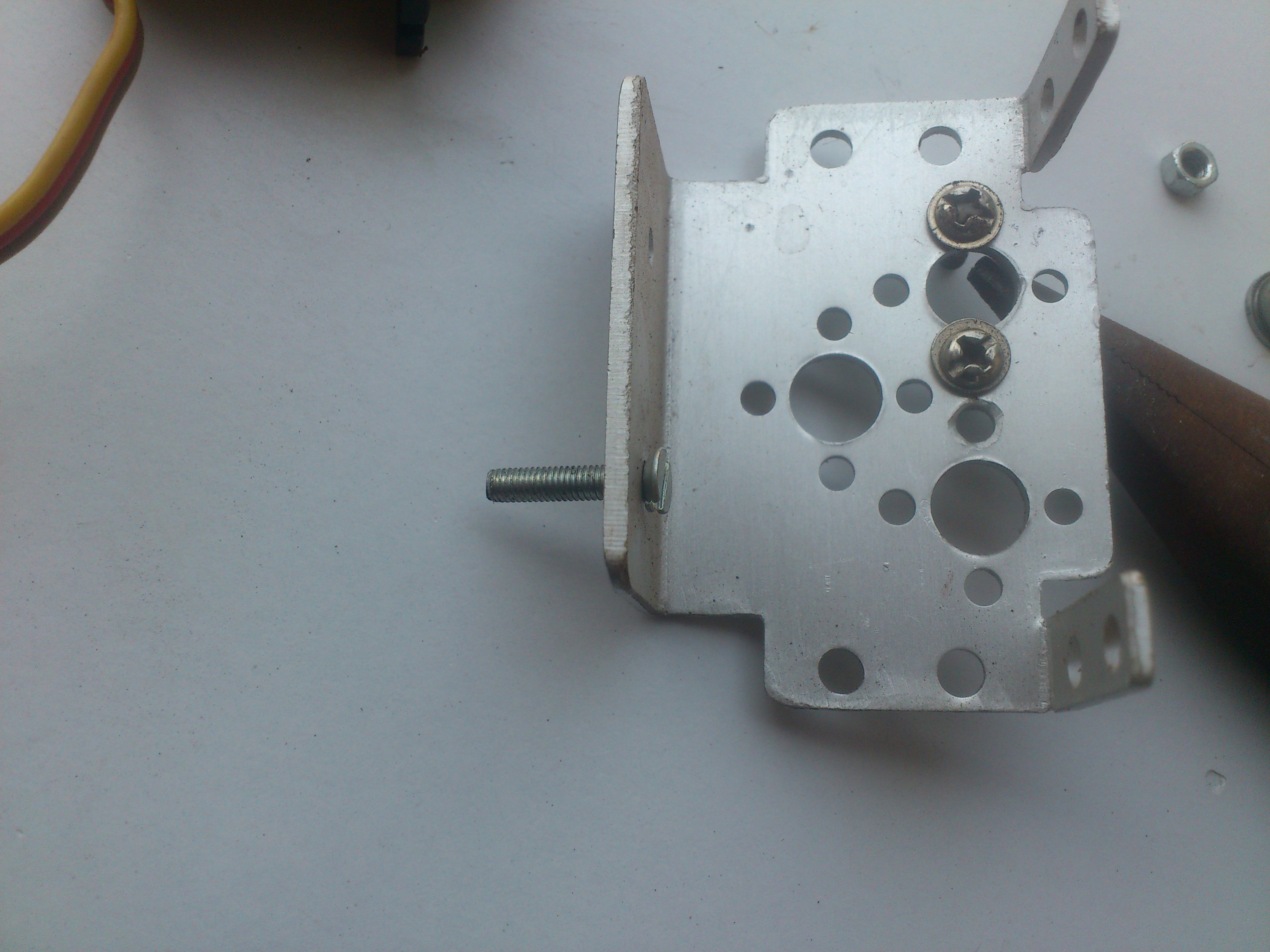
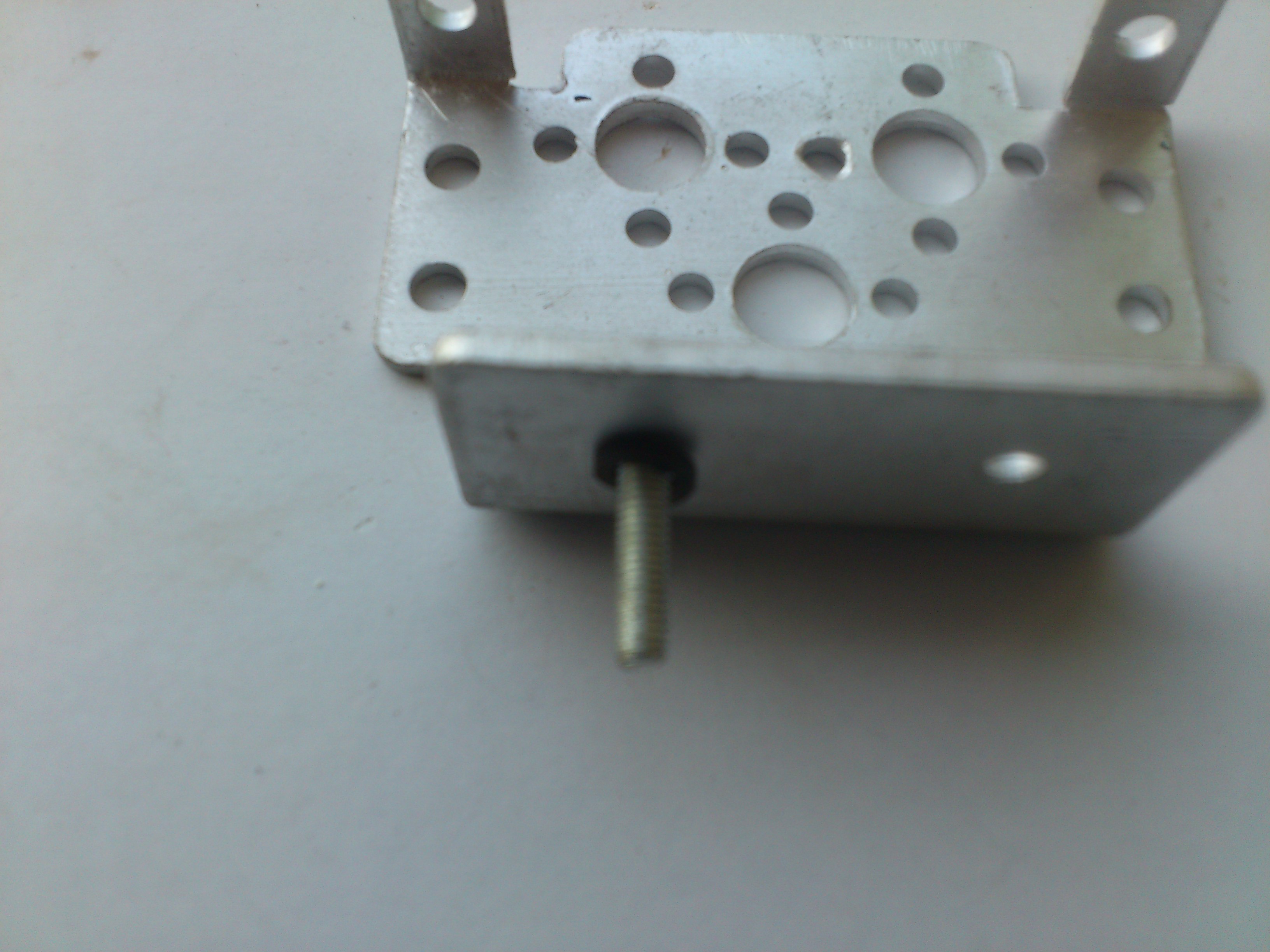
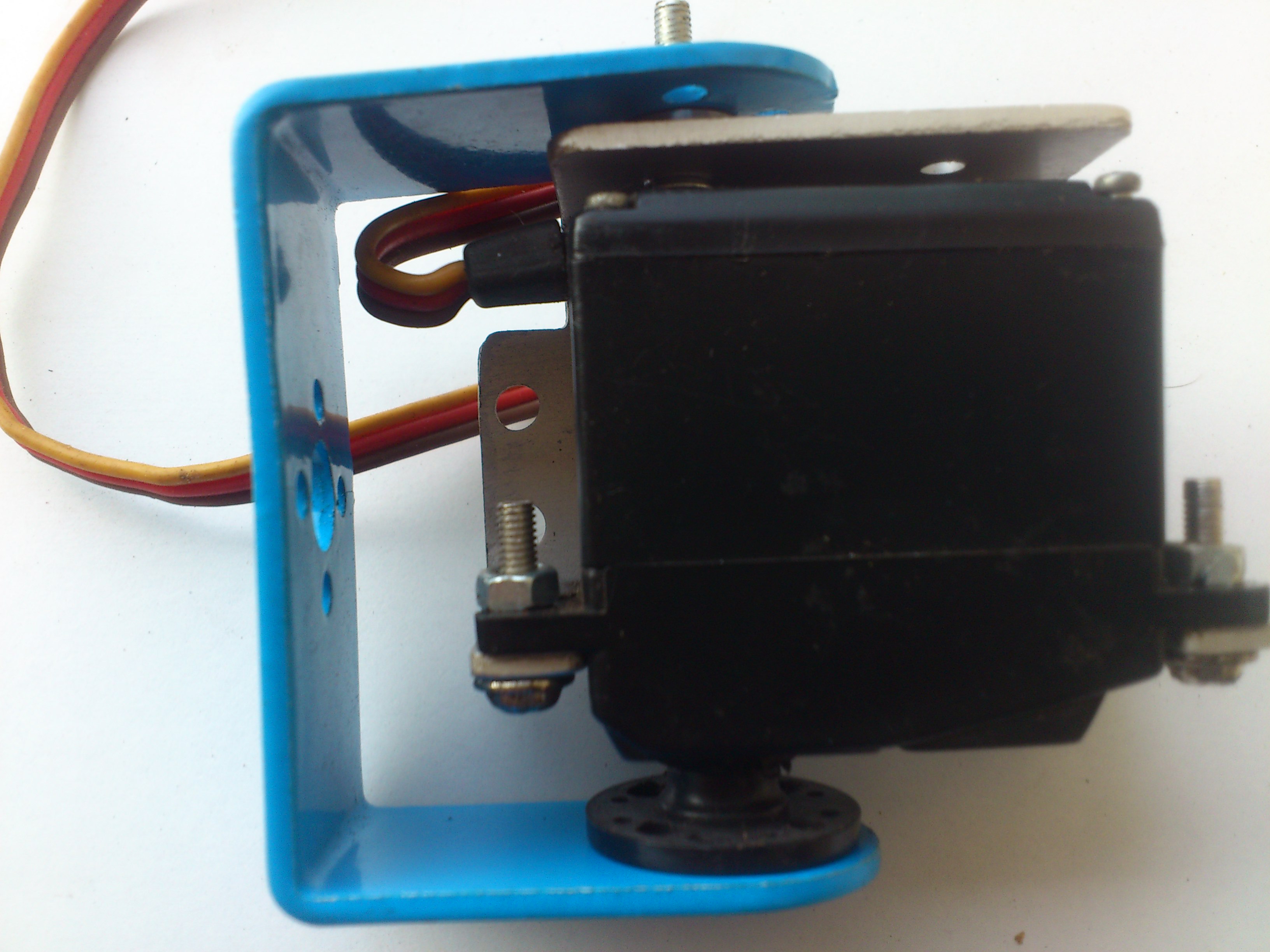
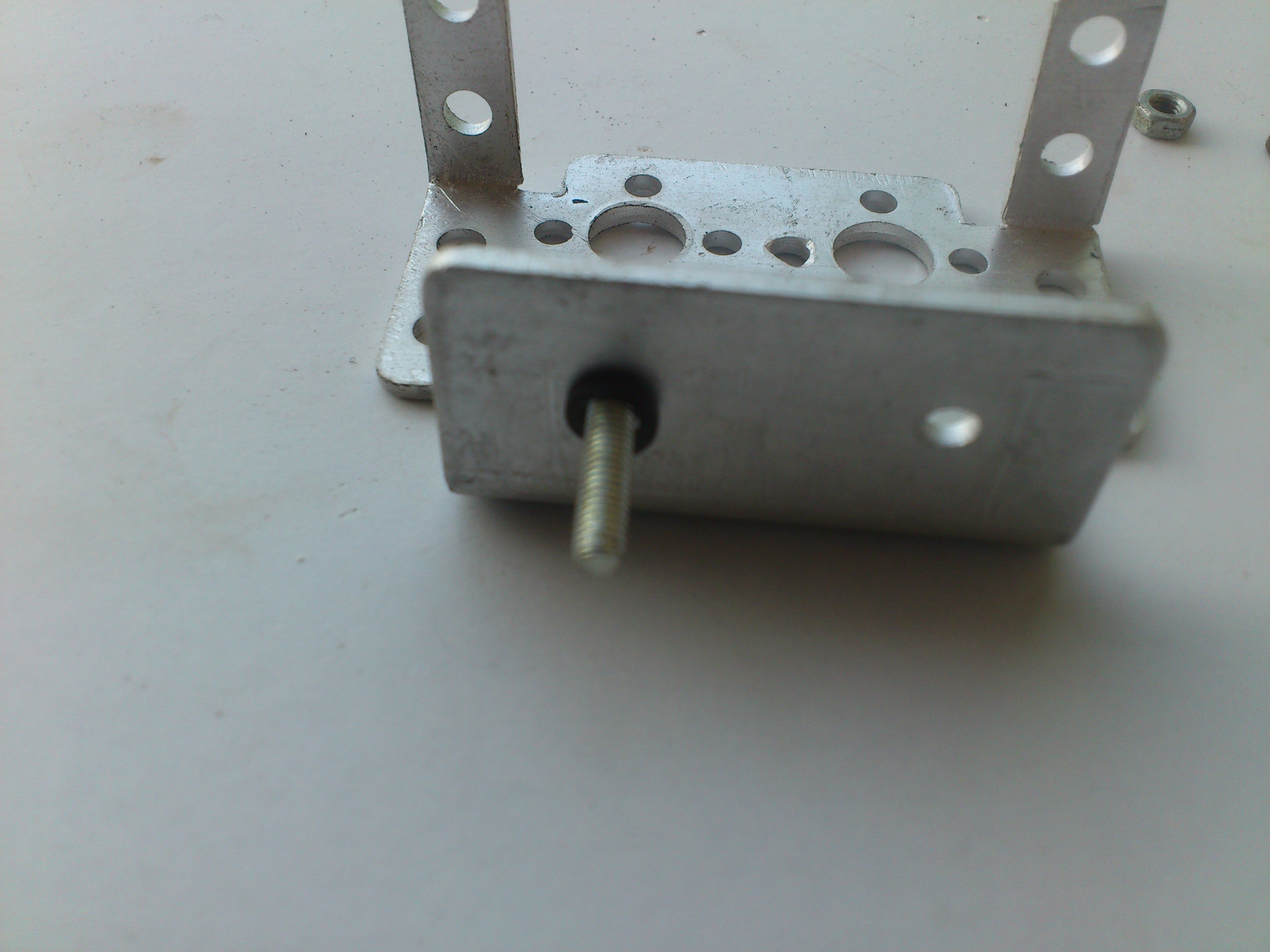
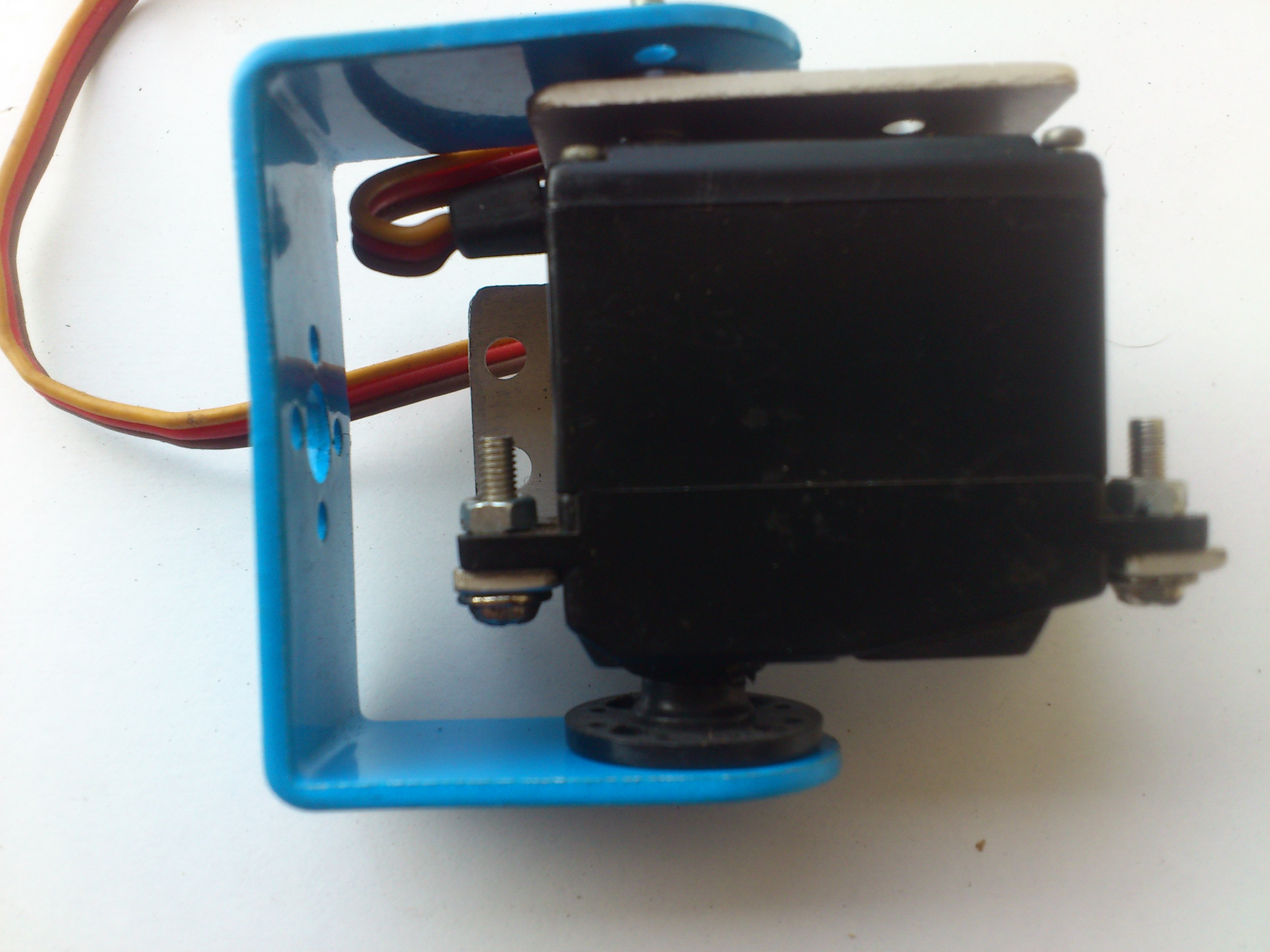
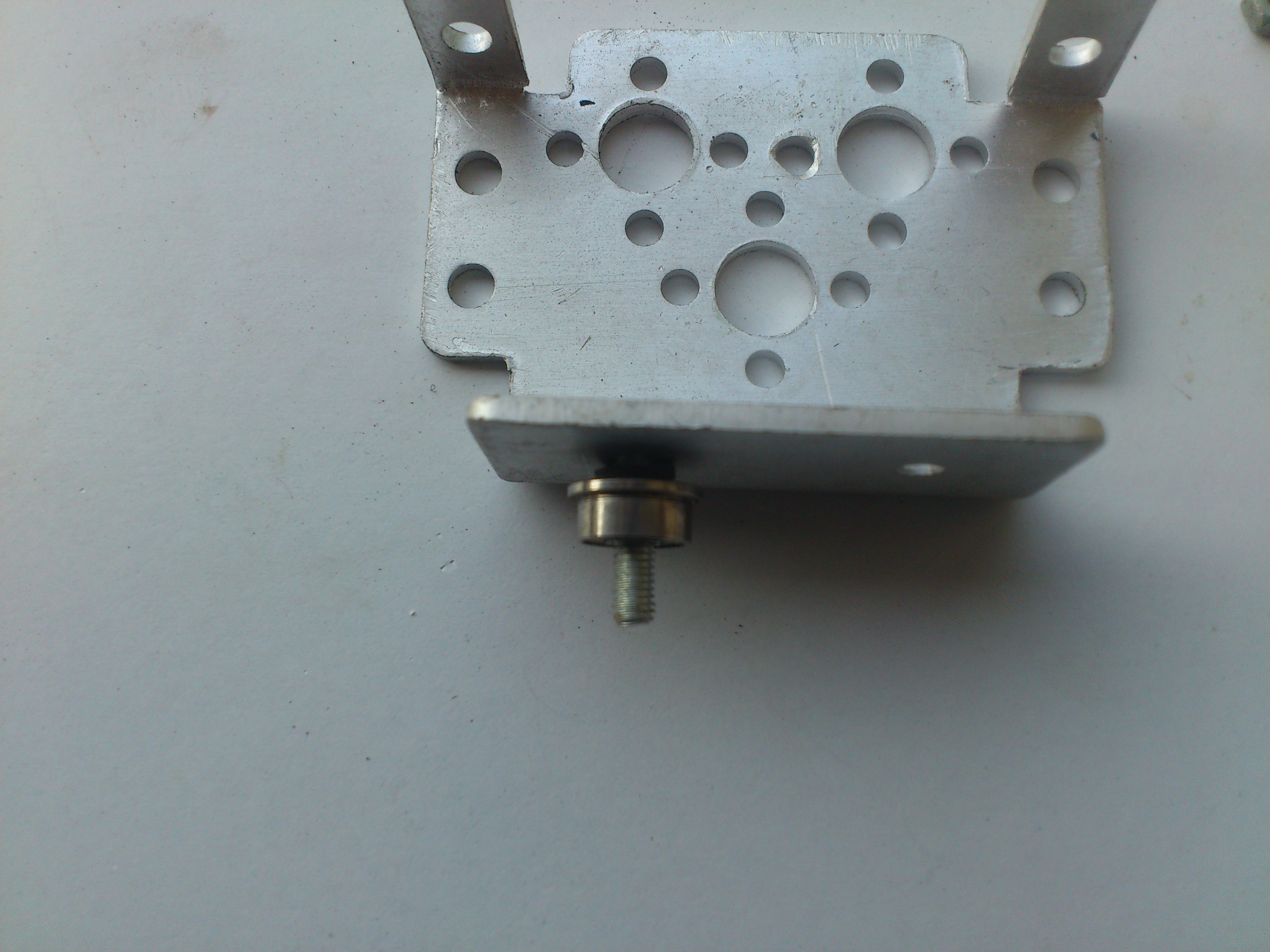
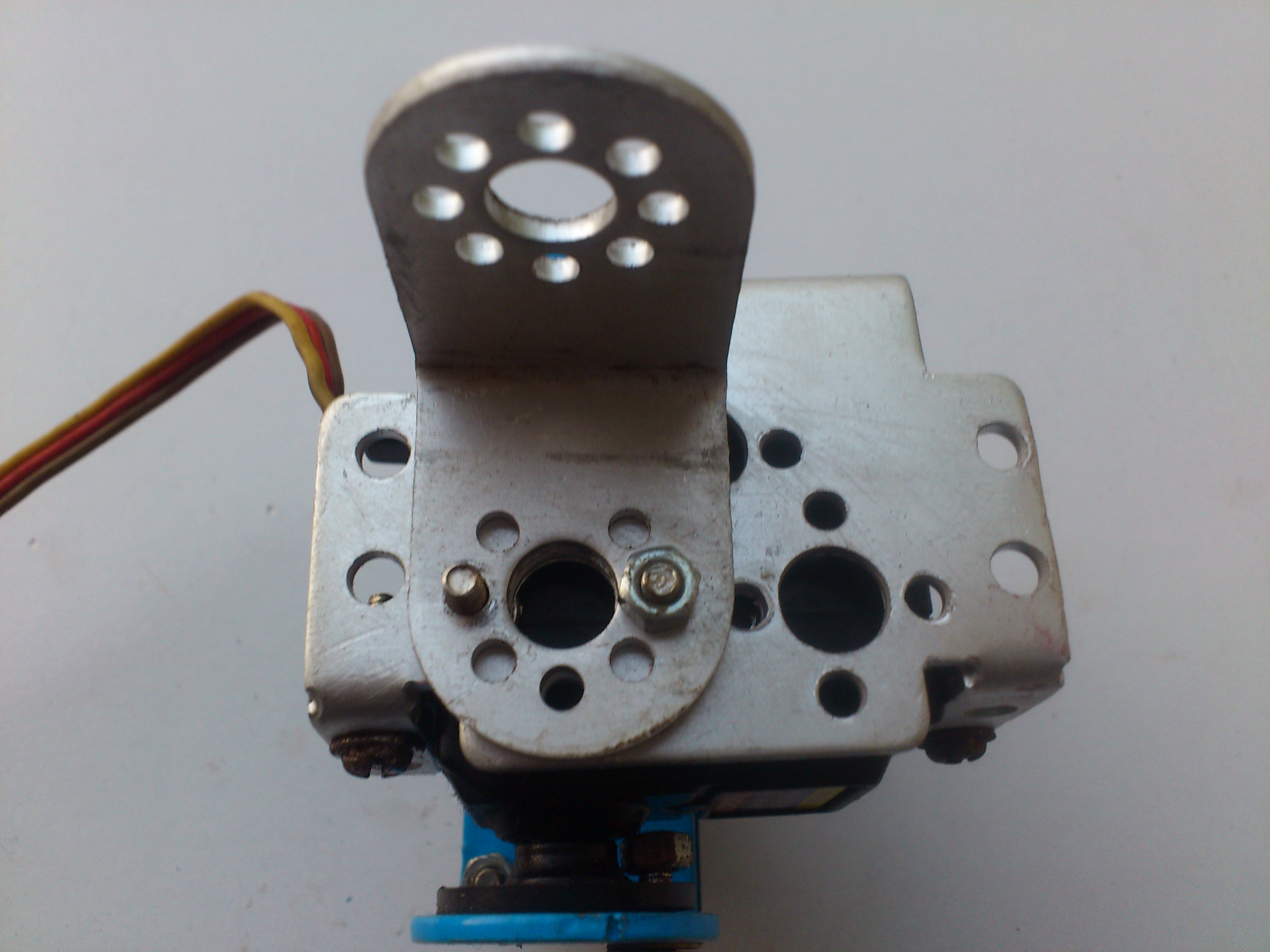
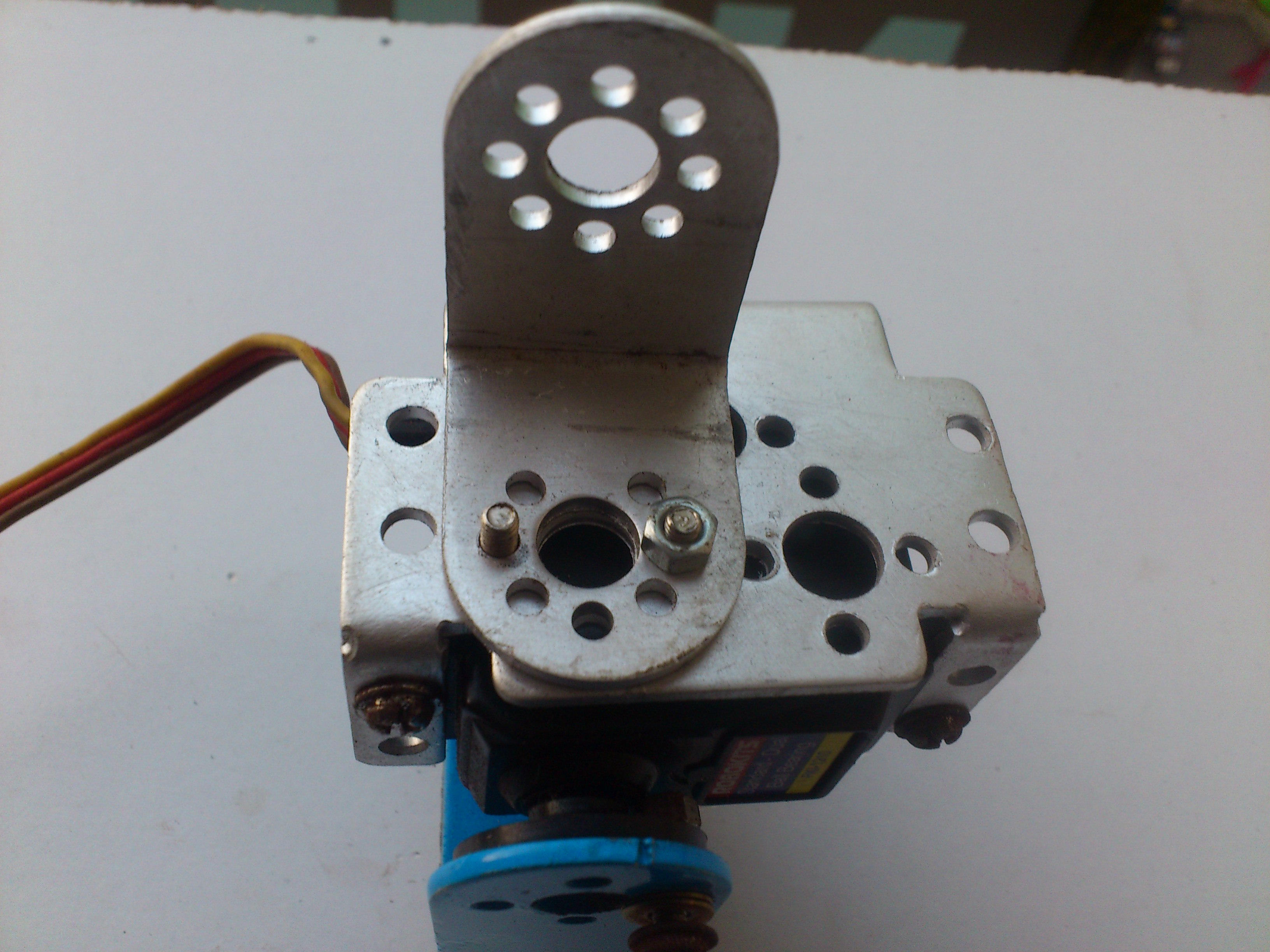
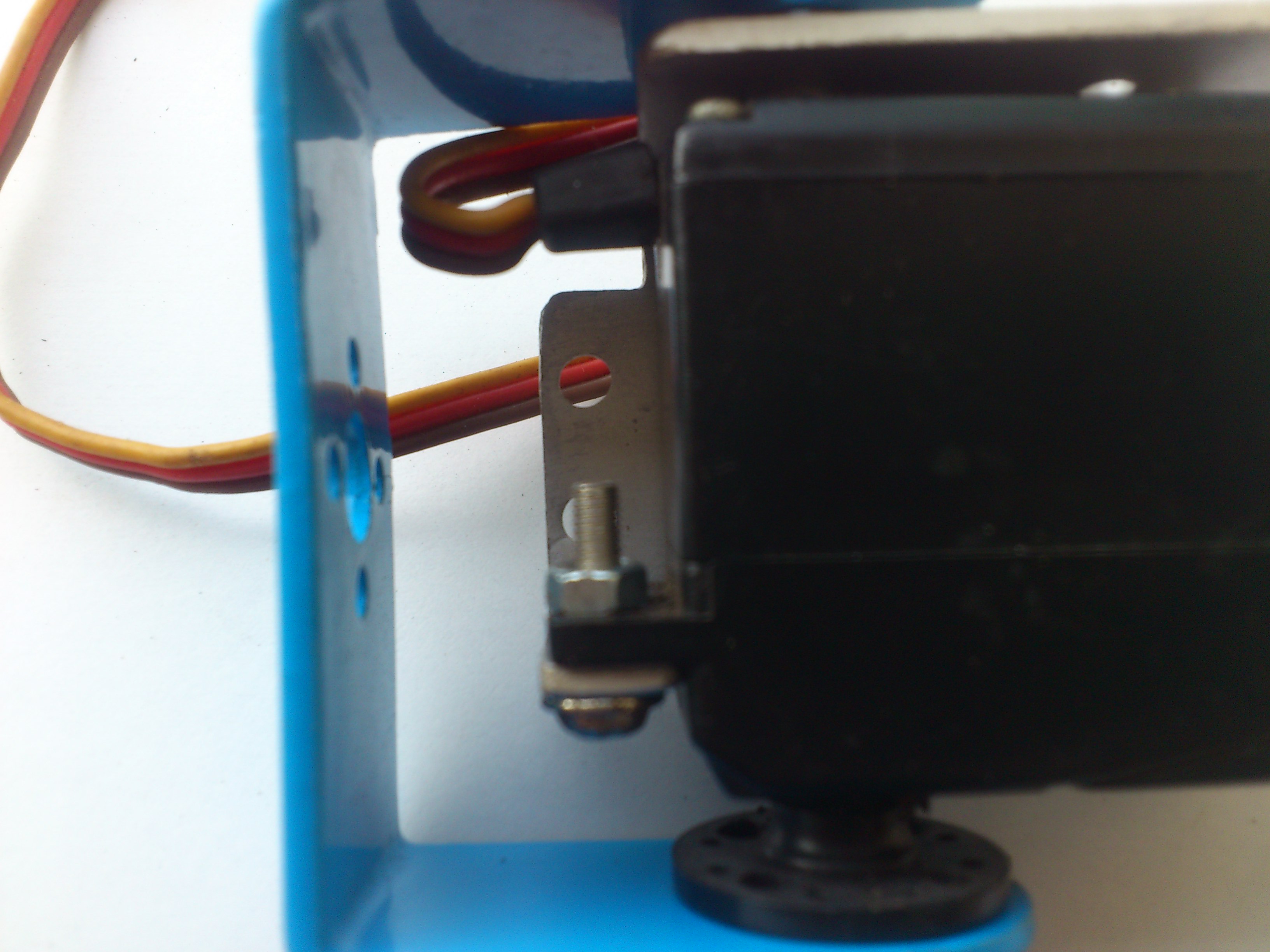
Above shown images are listed to show how the servo motors are mounted on servo brackets to build necessary type of mechanism,which in turn is building block of any robot build.
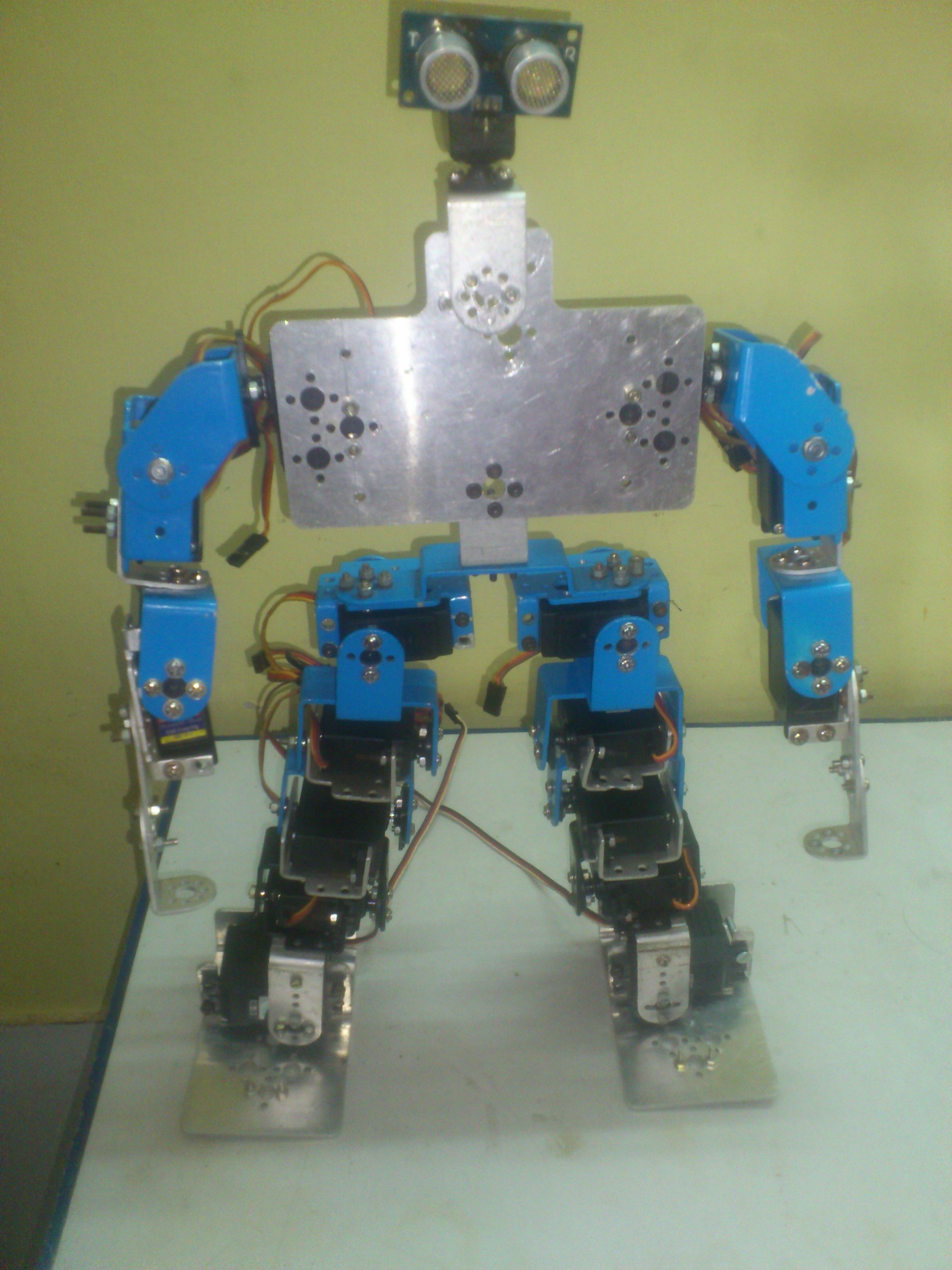
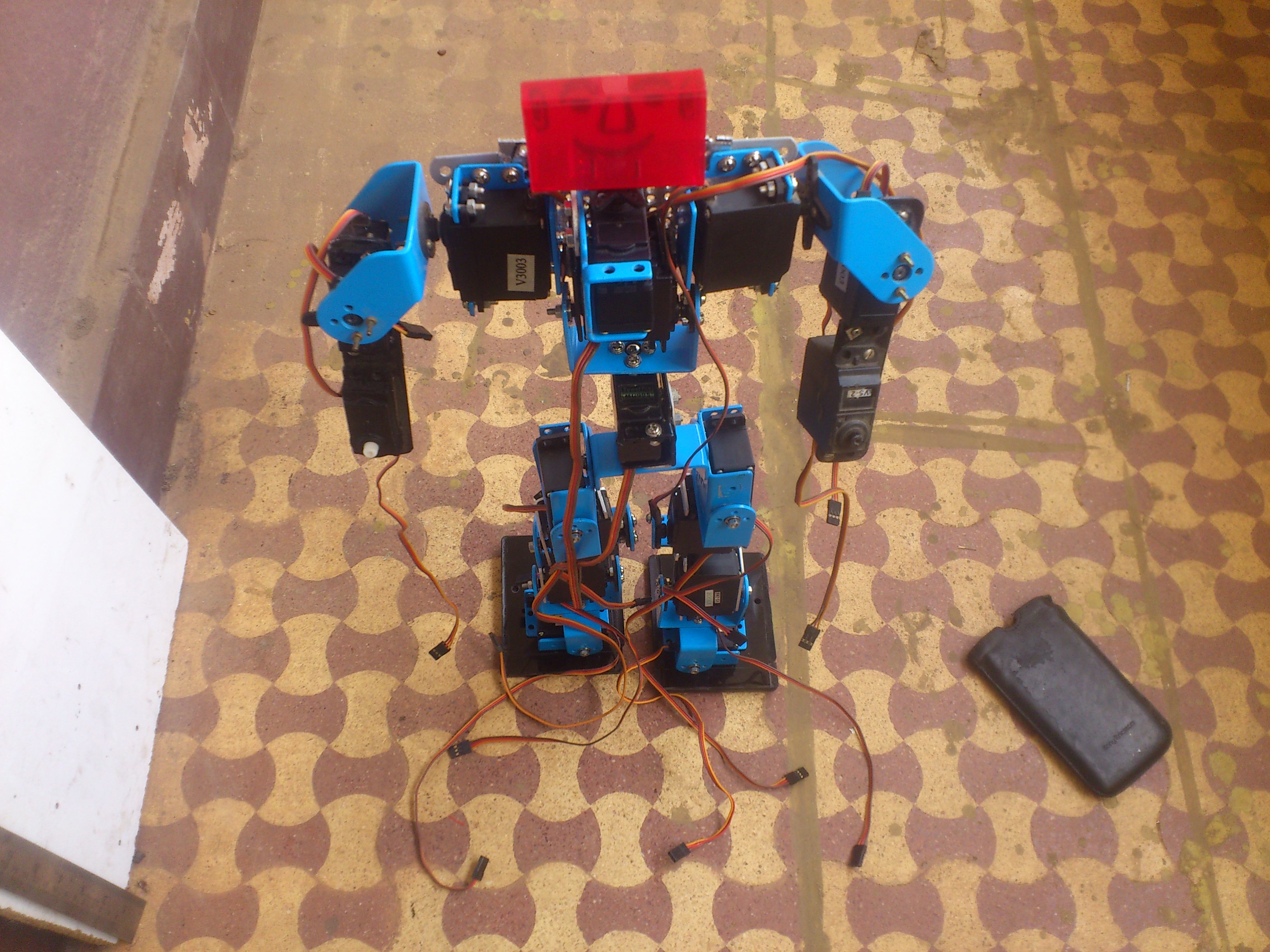
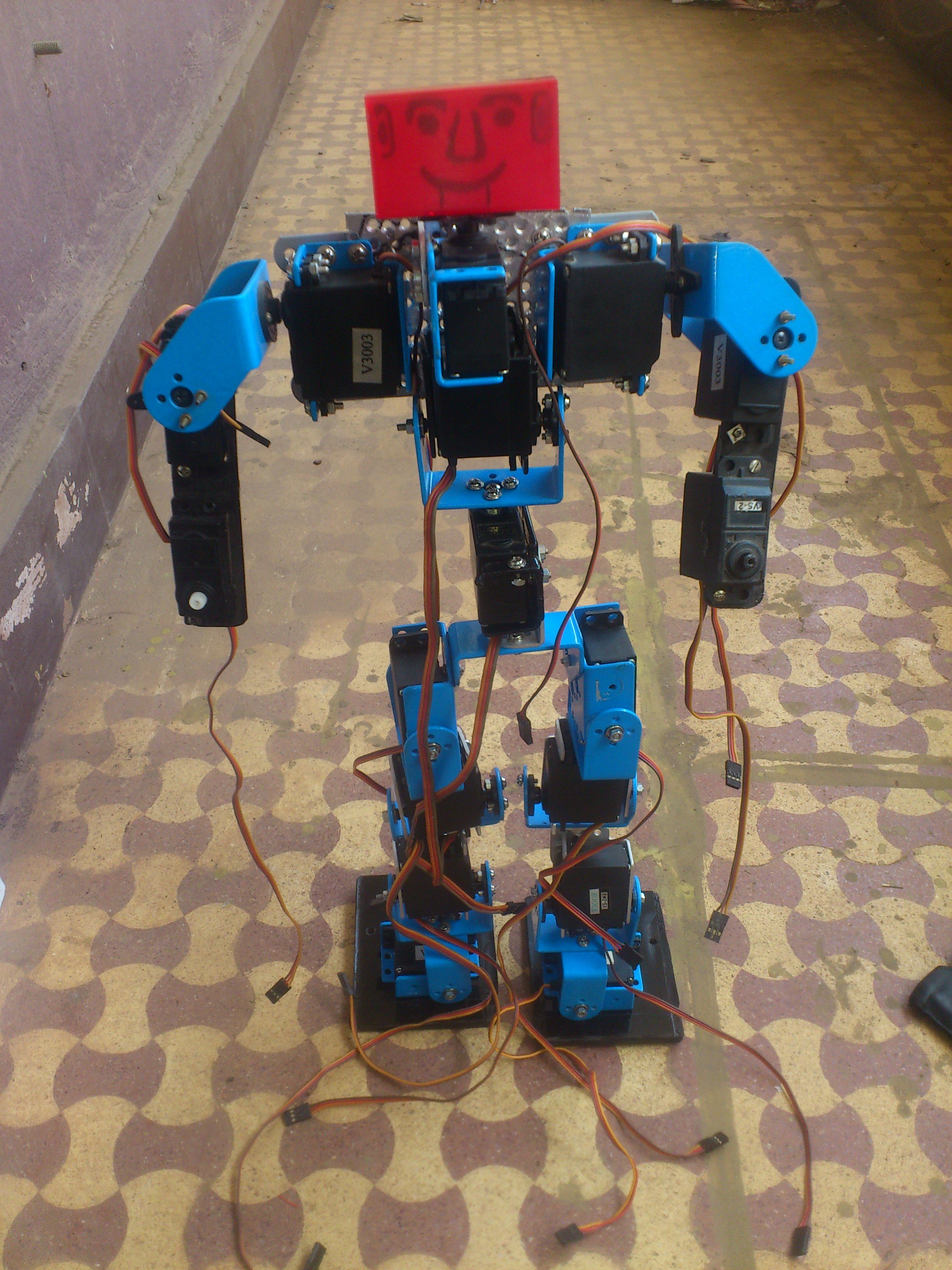
Below shown images will give you idea about how humanoid robot can be built in different configuration.
we tried different configurations of servo bracket sets to build and try a working final robot.it took us nearly one year to finaly complete the robot in 2013.
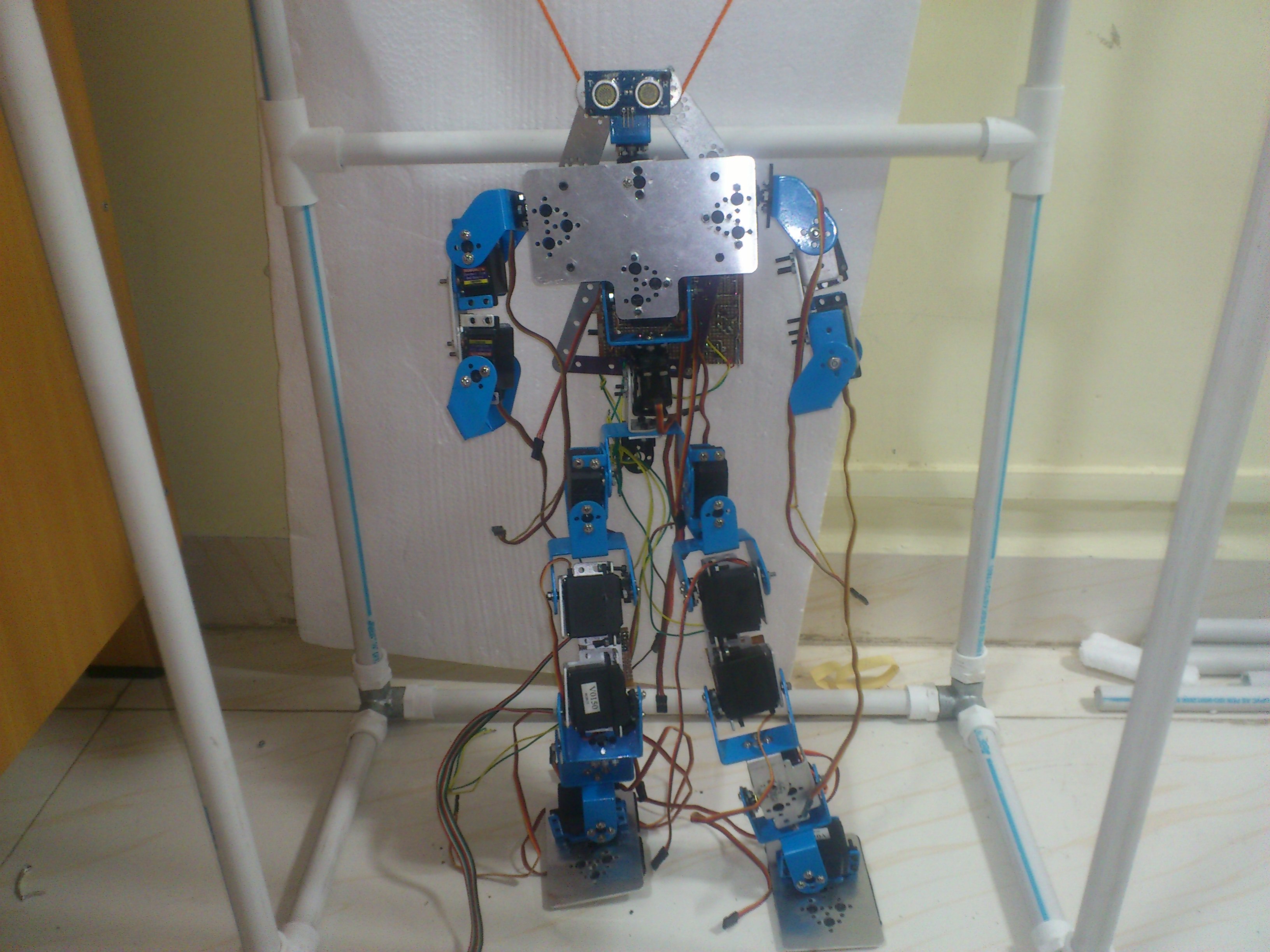
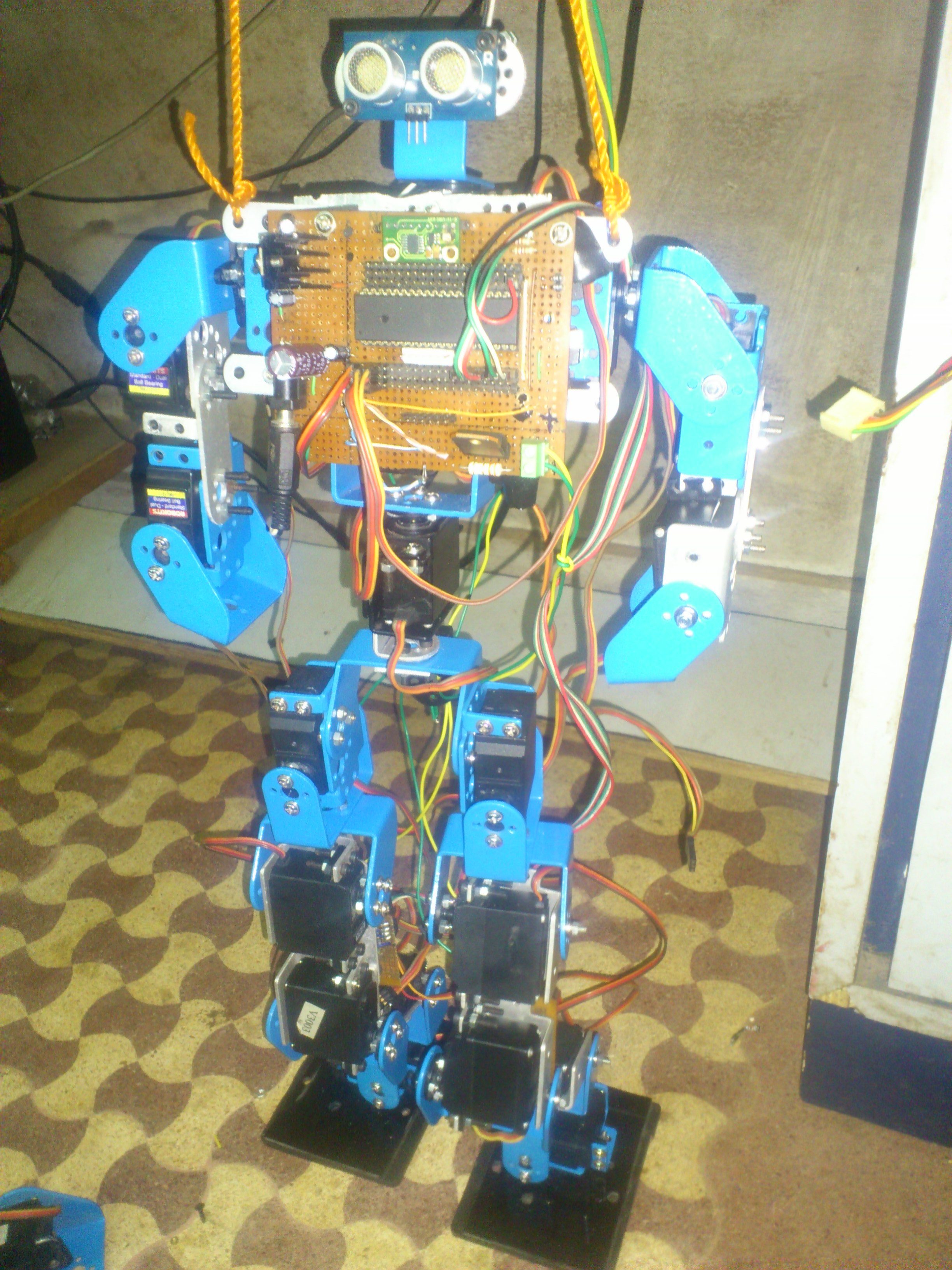
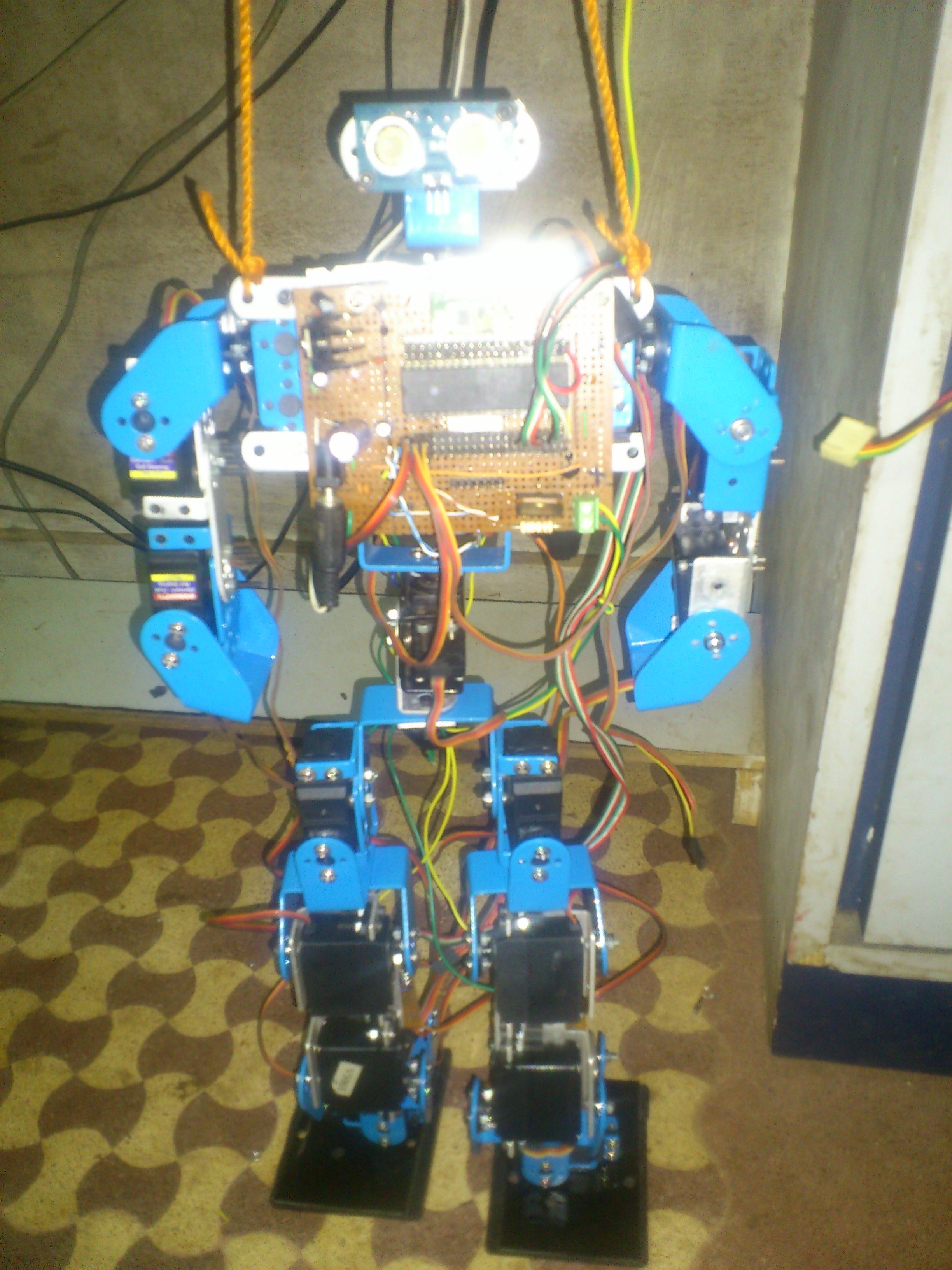
 –
–
Above configurations gave hell lot of problems due to centre of gravity imbalance and due to this we had to lower weight and height of robot.
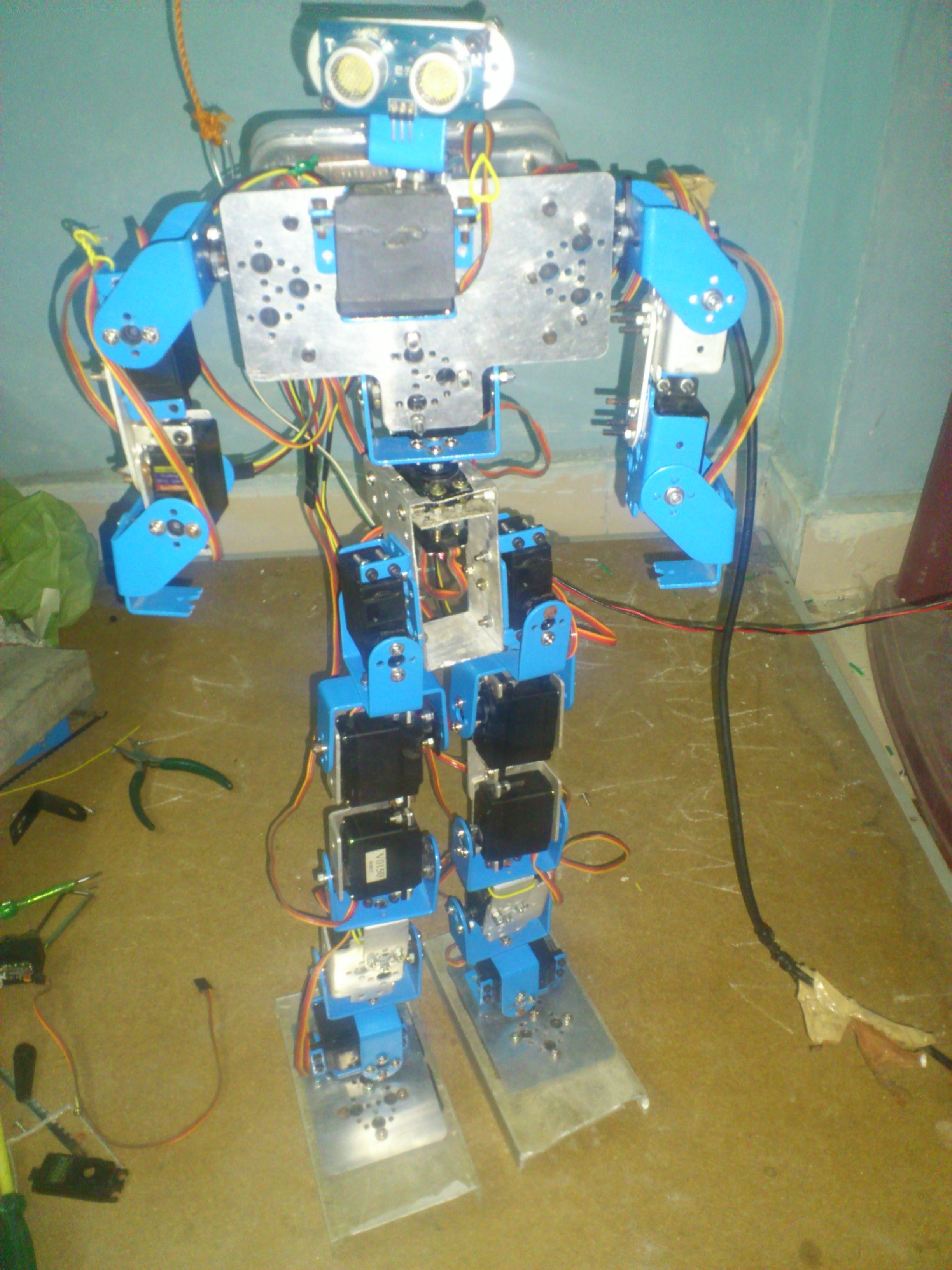
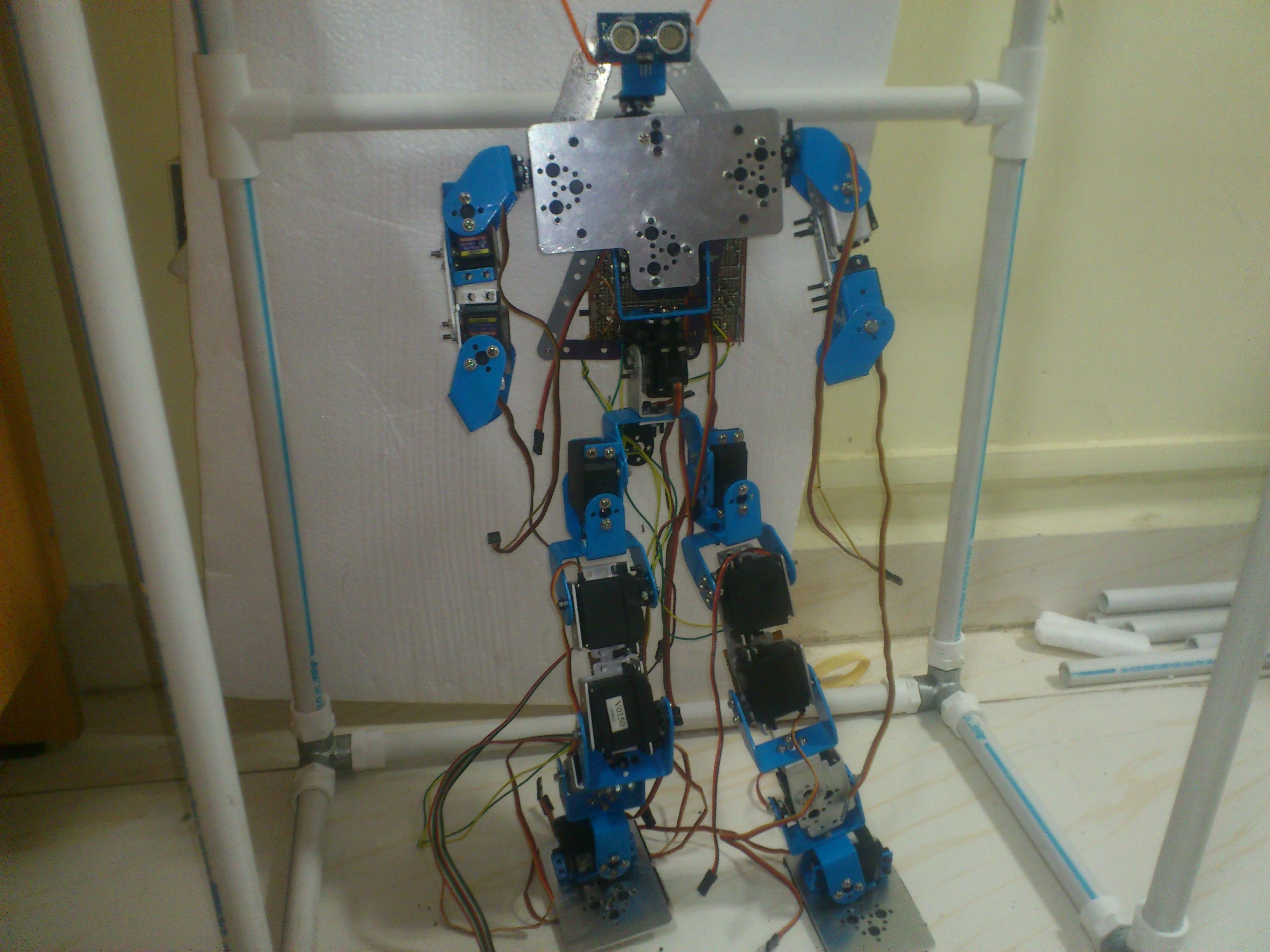
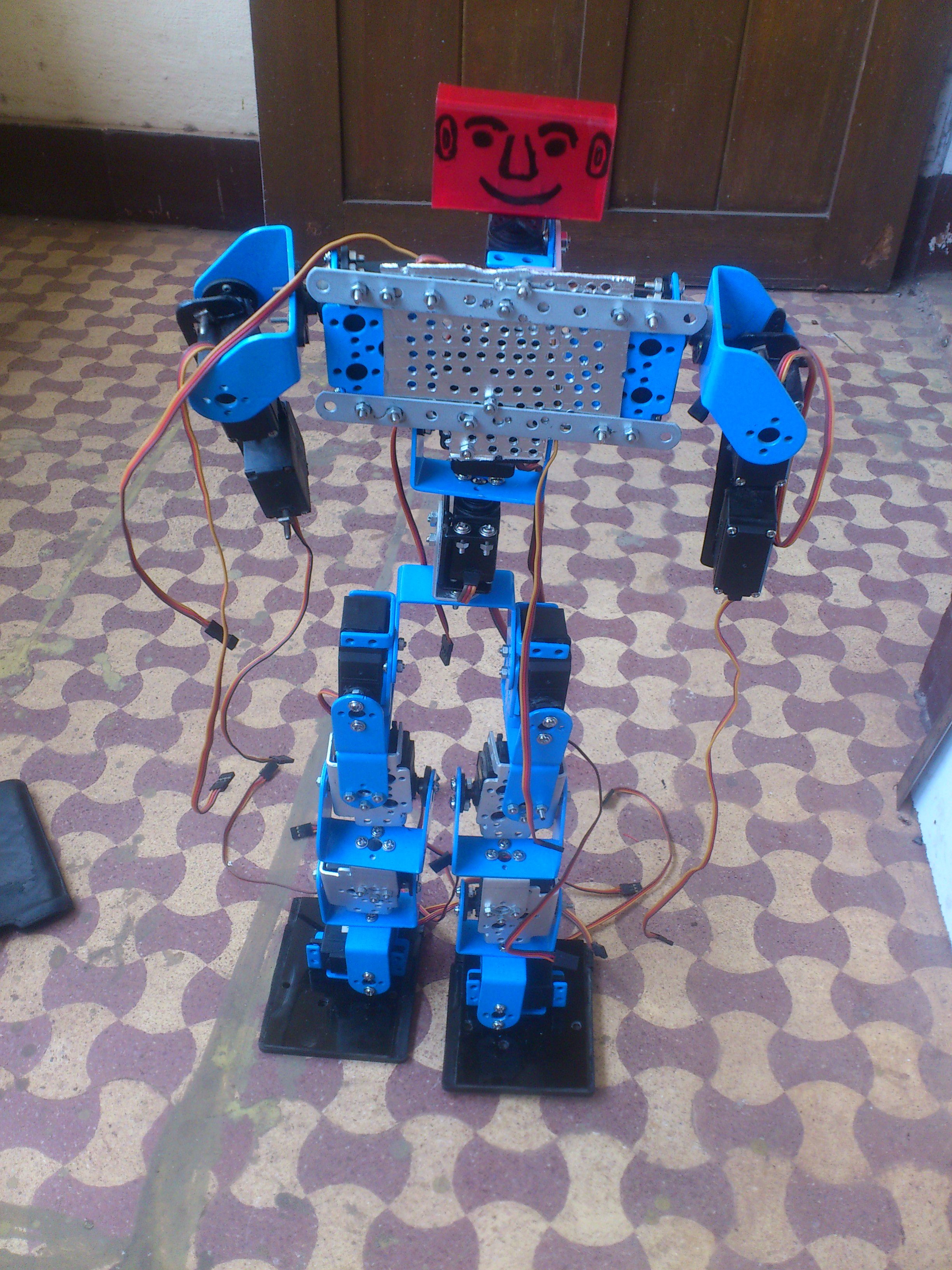
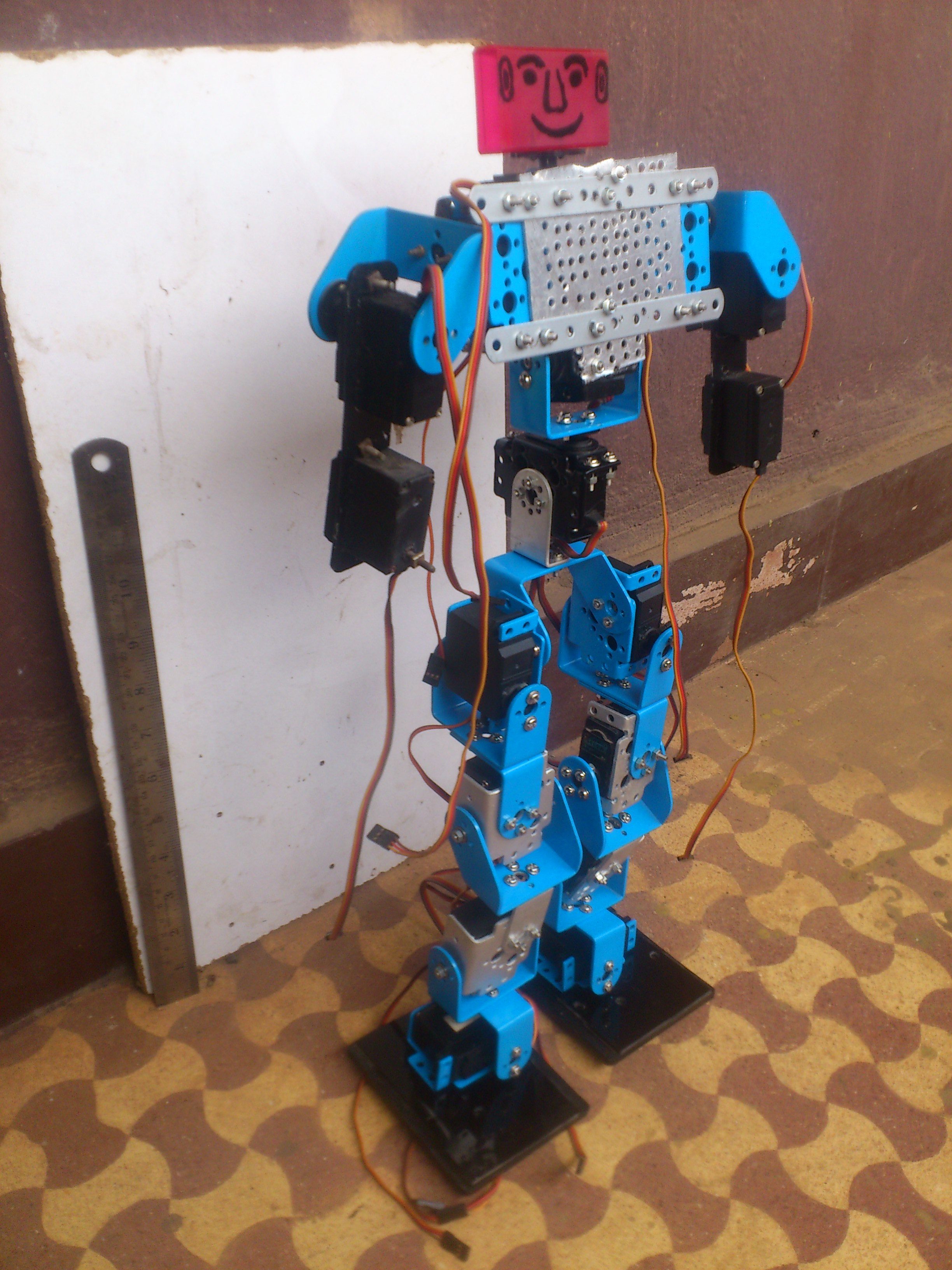
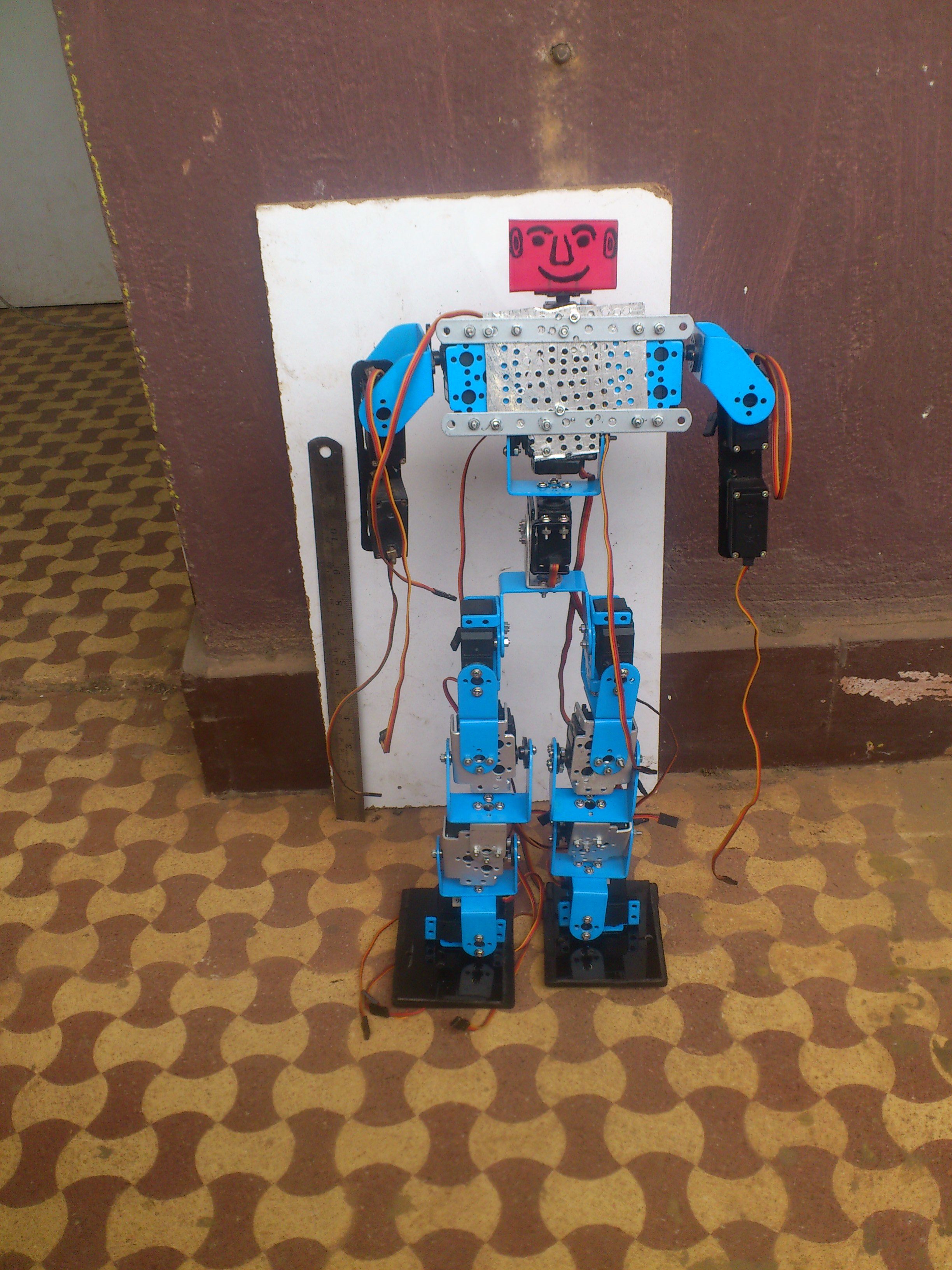
Below are images of finalised design.

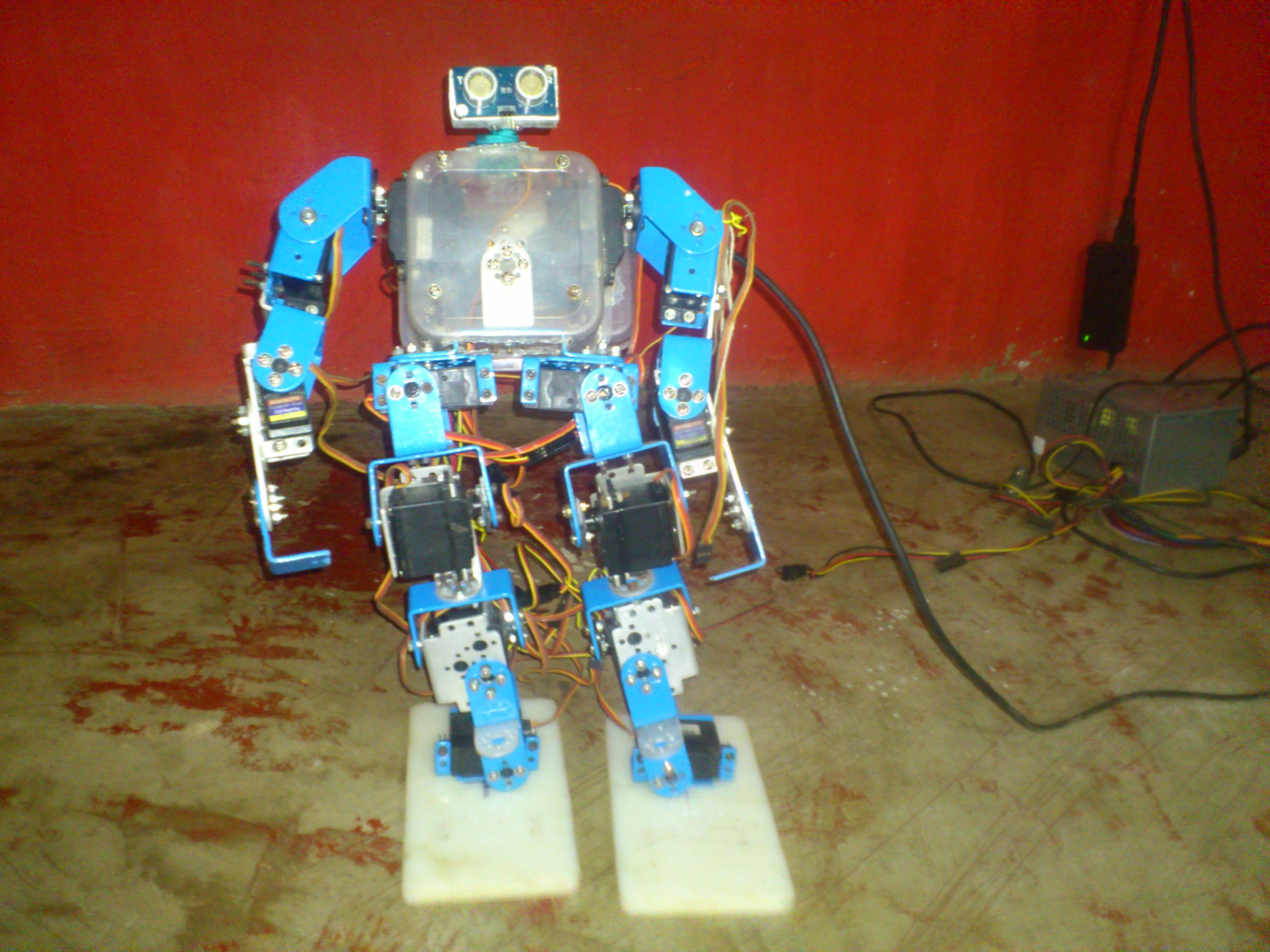

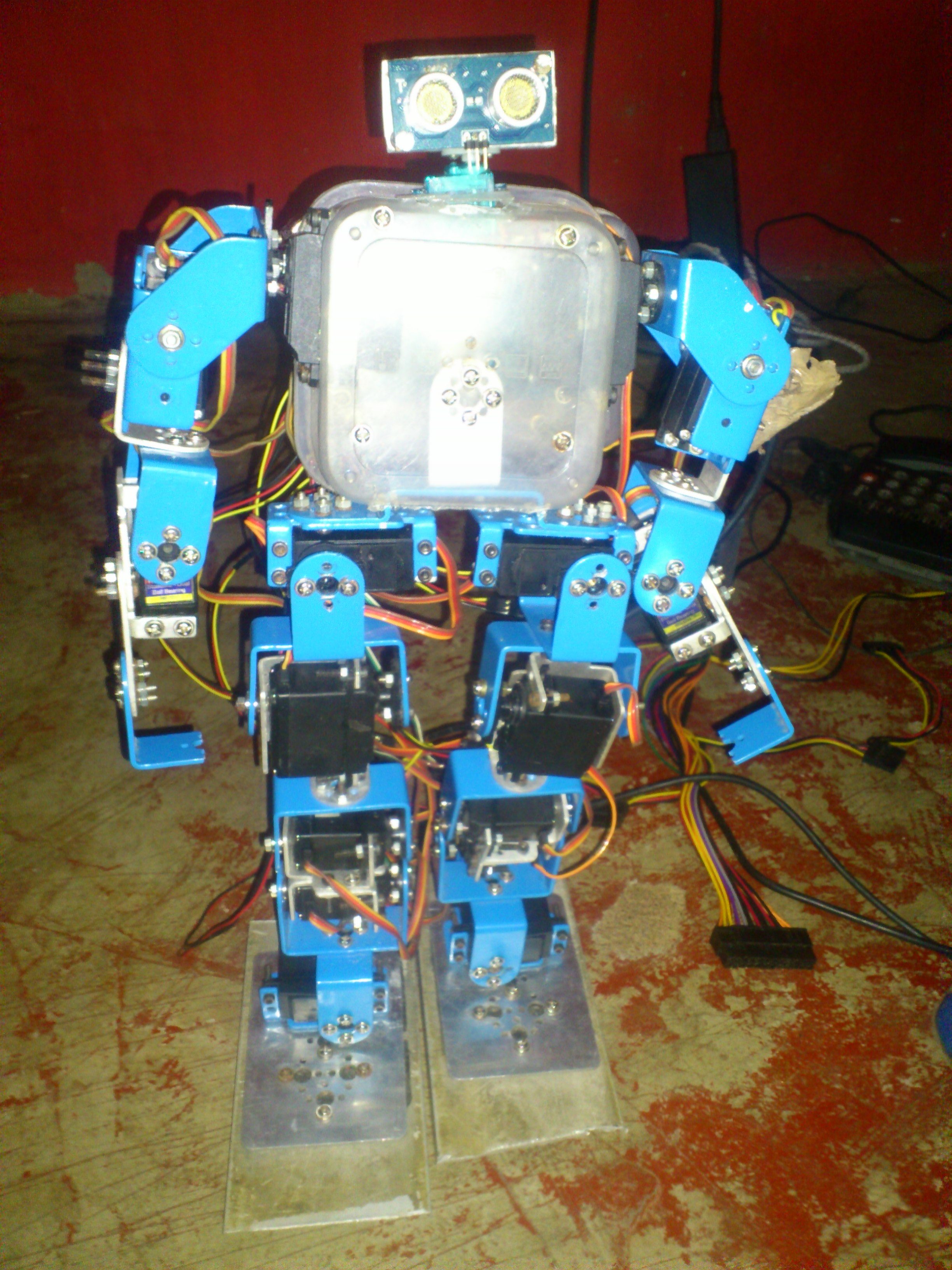
Final Configuration of Humanoid Robot:
This is 17 DOF Humanoid Robot constructed using Alcrylic 3mm Thickness Lasercut Torso and 3D Printed Standard servo bracket set all manufactured by Danuc Robotics India.Motors used are double ball bearing metal gear 15 kg-cm torque servo motor standard size motor. controller used is standard Arduino Mega 2560 sandwitched upon with servo controller board with on board DC – DC controller and operable with 30 cell Lithium Polymer battery .It is good for Robot fight competitions,since it can be programmed to do any sort of actions with Inverse Kinematics code.It has on-board Inertial measurement sensors which are usable with the code.
Requirements for HUMANOID Build :
1) Fully assembled 2mm Thickness Robot Torso with 50mm tall studs – 1 set
2)Lipo 30 Cell Battery.
3)Complete Servo Erector set for two legs and Hands.
4)Arduino Mega 2560 Robot Controller – 1 no.
5)Servo Controller Shield sandwiched on top of Arduino Mega 2560 -1 no
6)Battery Charger included -1no
7)Ultrasonic Range Finder mounted on Tilt and Pan Mechanism -1 Set.
8)IK Based Fully Tested Software
9) Standard size Double ball bearing ,metal gear 15 kg torque Servo Motors 17 nos.
10)3mm ID 8mm OD Flanged Bearings on each Motor Pivot.
11) 9 DOF Innertial Measurement Unit with Accelarometer, Gyro, Magnetometer sensors.